Ну так сравни свою схему подключения с вышеуказанной. Тебе только нужно добавить к ней ещё 2 светодиода, аналогично с резисторами, и 2-е кнопки. Так?
1 лайк
Выкладывайте правильную
1 лайк
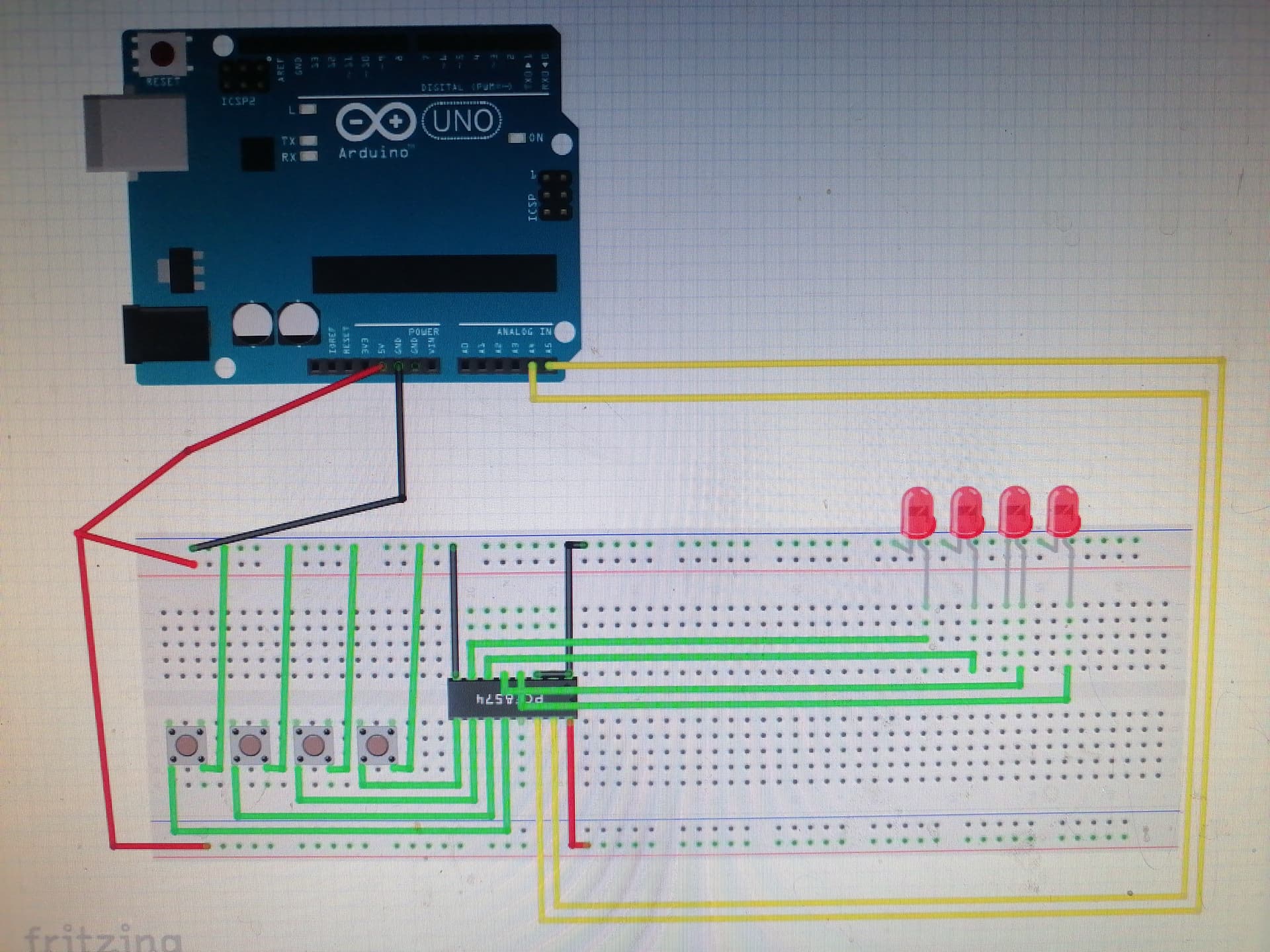
Только вместо одной микросхемы у меня модуль, который выше фотографировал.
Это не схема. Скорее наскальный рисунок.
Если бы светики были через 3К резисторы включены - можно было бы поверить. А без резисторов вряд ли.
Уверены, что вы плюс и минус не перепутали? Все говорит за это.
Я не помню, а смотреть с мобилы мне лень, если у PCF на выходе open drain, то эта схема тоже не рабочая.
оно самое
1 лайк
Ну мыж не будем спорить)))
1 лайк
Или пару оборотов ))
1 лайк
Это ппц… Я решил проблему. Я светодиоды и кнопки немного не правильно сделал. Кнопки не надо было с gnd убирать на +, а я их менял, когда менял и диоды.
Управление по минусу…
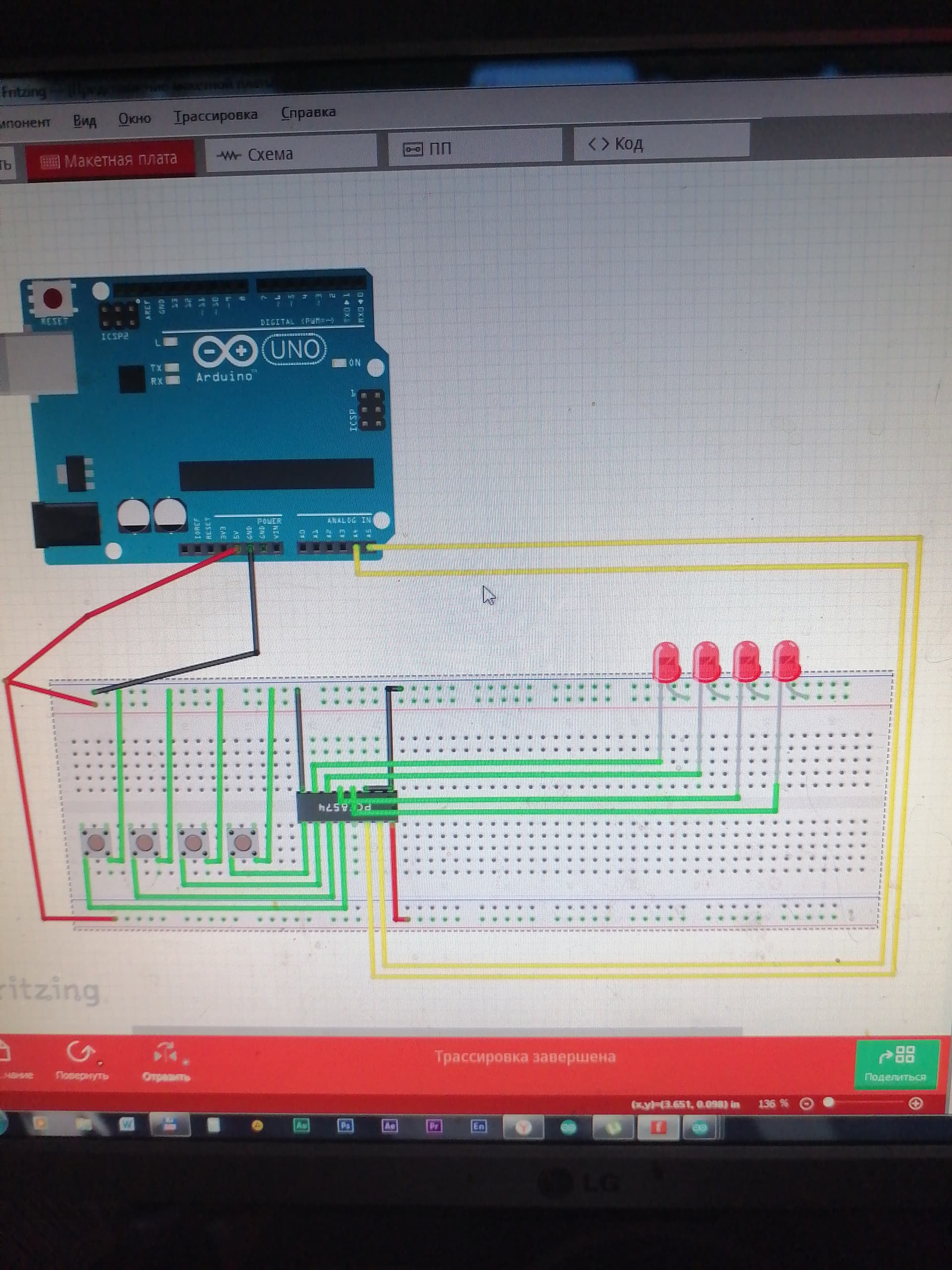
тогда ниже все правильно
И общий диодов на плюс уже перекинуты, короче, не тот скетч, не та схема, все как положено))
Скетчь остался тем же. Просто я в схеме попутался. Последняя, рабочая.
Завтра теперь приступлю к светодиодному кольцу с фоторезистором, реагирующего на лазер. ![]()
Нам сразу с форума уходить?
1 лайк
Нет конечно, как же мы без вас…
Как до корованов доберётесь, позовите меня.
2 лайка
И снова всем здравствуйте.
Подошол к этапу моделирования с сервоприводом, объясните пожалуйста на пальцах пожалуйста, как работает сервопривод:
#include <Servo.h>
Servo servo;
int angle; // переменная для угла поворота микро серво
void setup() {
servo.attach(9); // пин для подключения микро серво
}
void loop() {
// цикл для поворота от 0 до 90 градусов
for (angle = 0; angle <= 90; angle++) {
servo.write(angle); // сообщаем микро серво угол поворота
delay(20); // ждем 20 мс, пока серво не сделает поворот
}
// цикл для поворота от 90 до 0 градусов
for (angle = 90; angle >= 0; angle--) {
servo.write(angle); // сообщаем микро серво угол поворота
delay(20); // ждем 20 мс, пока серво не сделает поворот
}
}
в данном коде он повернёт то немного, то на полтора оборота (после рестарта ардуино) и потом станет и всё.
Хочю понять он так и должен или сервопривод не исправен?