int Dist_front;
neck.write(front_ang);
// Ждем, так как поворот занимает небольшое время.
delay(150);
здесь кажется идет замер расстояния впереди дальномером
int Dist_front;
neck.write(front_ang);
// Ждем, так как поворот занимает небольшое время.
delay(150);
здесь кажется идет замер расстояния впереди дальномером
аааа
то есть я должен угадывать мысли и давать комментарии по “тому” коду, который залит в робота, а не по тому что вы приводите?
тогда ждите вечера, я достану хрусталь.
А я поменял “взад”
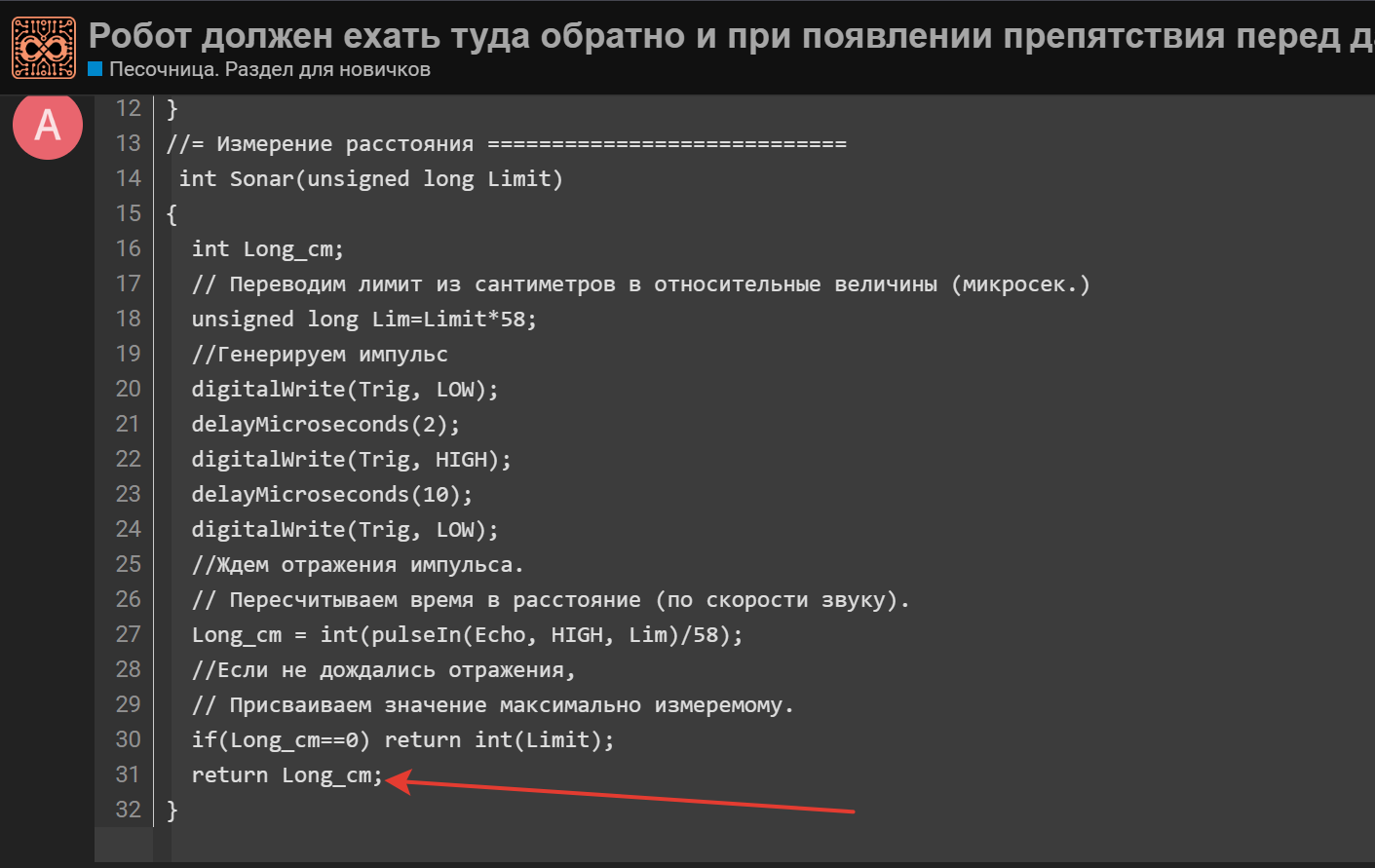
замер расстояния впереди дальномером
замер расстояния впереди дальномером…
где тут замер?
вообще от дальномера требуется просто, чтобы он смотрел прямо и при наличии препятствия останавливал робота на заданное время
там если дистанция меньше 10 оба двигателя переводятся на LOW
я понимаю, только делаете все наоборот.
да ну??
двойка по математике в школе?
т.е больше. точно. сейчас поменяю. а 10 это вообще в каких единицах?
@AAA, в дальнейшем не создавайте пожалуйста дублирующие темы.
Это троллинг, не иначе. Невозможно быть таким…неосведомлённым.
понятно. но пока все таки дальномер не активен абсолютно
и как выставить дальномер, что бы ровно вперед смотрел?
это и понятно, потому что я на 99% уверен, в робота залито не то что мы обсуждаем тут.
именно то, что обсуждаем я загружаю в него
я скопировал полностью код который в него загружаю и скинул сюда
почему дальномер не работает?
да хер его знает.