Добрый день, люди.
Столкнулся с одной проблемкой. Делаю полетный контроллер для ракеты. И для отслеживания высоты полета решил использовать датчик BMP280. Подключил его по I2C.
И обнаружил, что этот датчик обновляет данные по давлению (на основании которого рассчитывается высота) раз в пять (примерно) секунд! Это пипец как долго. За это время ракета может взлететь и упасть (утрирую). Можно ли как-то ускорить этот процесс?
Или я изначально не тот датчик решил использовать?
Это ты каким местом “подключил”? До 157Гц этот датчик поддерживает. Читай даташит.
Ок. Спасибо))
Вроде бы чуть разобрался.
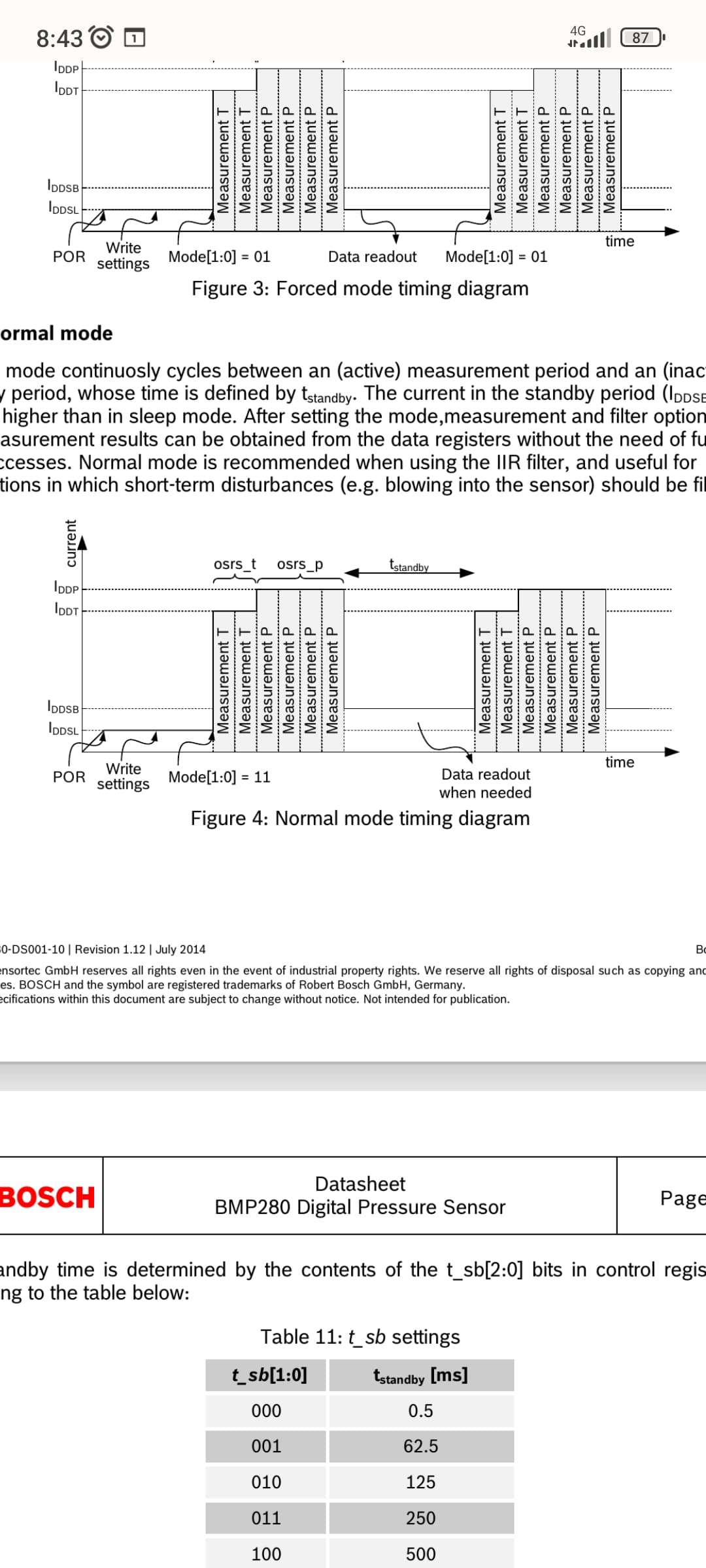
Изменил значение “standby” на 0,5 мс и всё заработало ))
У bmp280 нет никакого ‘значения “standby”’