Нужен был преобразователь на такие напряжения для малых токов (1-5ма), на алиэкспрессе не нашел, гугл у меня давно забанили, пришлось сделать самому. В тумбочке нашлись восьминоговые Attiny85 и Py32f003L18, с первыми всё проще, сделал на них, кто в силах одолеть а-ля STM32 может переработать код под второй чип, ну а если никто не в состоянии, придётся самому )))
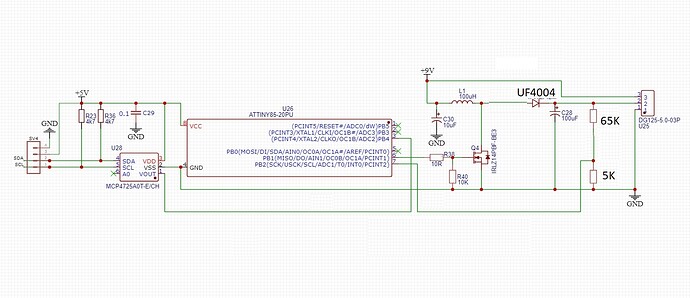
Схема приблизительно такая (силовая часть нас не интересует, каждый сделает под себя).
Я так понимаю скважность уменьшается пока напряжение ниже порога?
А не будет ли ситуации когда АЦП ещё не прочитал или прочитал близко к порогу, а следующим импульсом напряжение уже выше нужного? Смущает делитель на 128. Не слишком медленно? Может лучше использовать компаратор или прерывание PCINT? А регулировать делителем в схеме.
ничё не знаю, схема рабочая, на 100 вольтах нагрузку 5ма держит, мне больше не надо, точнее мне надо всего 500 микроампер
Да, ШИМ 32 килогерца ежели что
мне нужна была регулировка, проект повторен два раза и не только мной, у меня трудится старый добрый 2SK3670 (ну не доверяю я китайцам) и UF4007, индуктивность намотана на колечке от материнской платы INTEL, там высокочастотные преобразователи (мегагерцы) так что пришлось мотать до заполнения проводом 0.35 (400 микрогенри), силовую можно сделать как угодно под себя
Сделан на чипе XL6007E1, такой чип есть в чип и дип, по 100 рублей, а вот даташит они приводят только на XL6007 а там на напряжение выходное только до 60 вольт
Из отзывов на аналогичные преобразователи:
Модуль интересный, очень маленького размера, выдает 309 вольт постоянного напряжения максимум,
минусовой контакт у этого модуля общий, чтобы его запустить надо контакт "enable" замкнуть с плюсовым
контактом входа Единственный минус, это очень маленькие дорожки для припайки проводов,
собран на микросхеме XL6007E1
В любом случае мне нужна регулировка по I2C - а таких я не нашёл
там же пояснения есть, запускаем измерение ADC, в прерывании меняем очередность каналов, сносим в массив, в лупе из массива берём, сравниваем, корректируем куда движемся изакидываем в регистры, всё
ну что там сказали эти - кандидаты в доктора?
PS а вот сделать средствами среды ардуино на STM32F103 видимо не получится, чтение аналогового пина занимает порядка 60 микросекунд
PPS только hard только CMSIS
Хардор! Только регистры) Кто бы сомневался. Ардуино ИДЕ вообще не годна для реалтайма. Не знаю как люди там выкручиваются. Напрямую в регистры писать только полдела. А вот отлаживать уже хрен там.
Это основная идея данной темы.
Надо получить напряжение, возьмем вот такую схему, почему такие значения - “кто жеж знает, но работает”. Возьмем вот такой код, как он работает, почему именно такая частота ШИМ и такие пределы регулировки “кто жеж знает, но работает”.