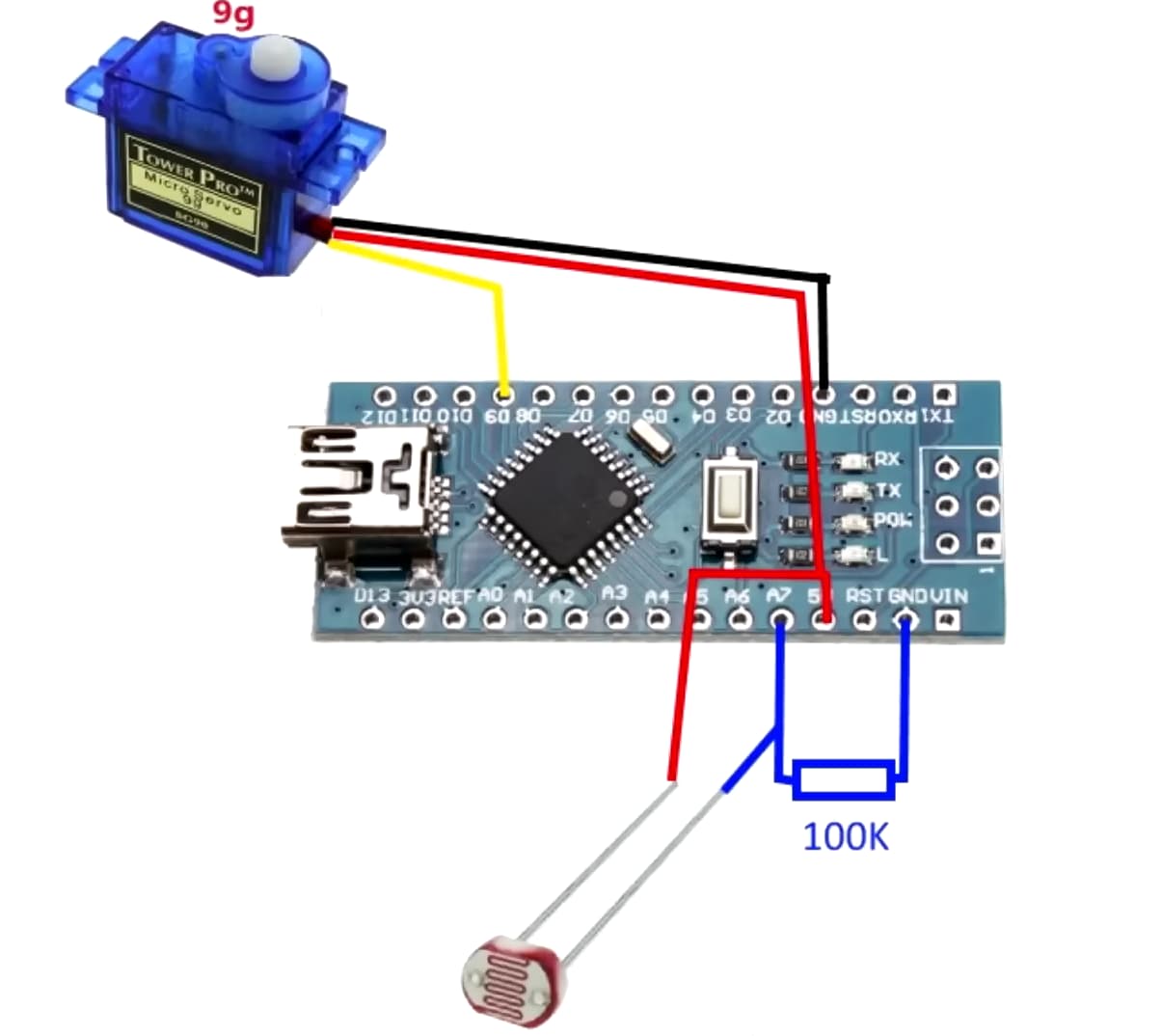
Всем привет,код при запуске какое то время работает и через минуту где то перестает , но бывает и раньше . Схема простая , на фоторезистор попадает свет и сервопривод поворачивается. Помогите пожалуйста
Servo myservo;
int val;
void setup()
{
myservo.attach(9); //Pin where Servo motor signal is conected.
}
void loop()
{
val = analogRead(7); //Pin where LDR is conected.
Serial.println(val);
if (val > 800) //if above it will move to 45
{
myservo.write(70); //angle when light
}
else myservo.write(18); //angle when dark
delay (25);
}```
Servo myservo;
int val;
void setup()
{
Serial.begin(9600);
myservo.attach(9); //Pin where Servo motor signal is conected.
}
void loop()
{
val = analogRead(7); //Pin where LDR is conected.
Serial.println(val);
//val = map(val, 850, 1023, 0, 180); //1st values is resistor values input, and second is the servo angle, eg, 850 reading is 0 Deg.
if (val > 1010) //if above it will move to 45
{
myservo.write(70); //angle when light
}
else if (val < 1015) // if less then move back to 0
{
myservo.write(18); //angle when dark
}
delay(25);
}```