код вот этот, другие (полее поздние и более “правильные” модификации я не пробовал, попробую позже, при наличии свободного времени)
void setup() {
pinMode(10, INPUT);
pinMode(9, INPUT);
pinMode(20, OUTPUT);
pinMode(22, OUTPUT);
if (digitalRead(10) == 0 && digitalRead(9) == 0 ) { // если каретка ни вверху и не внизу , то двигать вниз после паузы
delay(1000); // пауза перед движением вниз
digitalWrite(20, 1); // едем вниз
}
}
void loop() {
if (digitalRead(10) == 1 && digitalRead(9) == 0) { // если есть лог 1 на выходе 10, и лог 0 на выходе 9, то каретка вверху, надо её остановить. сделать паузу и начать двигать вниз
digitalWrite(22, 0); // останавливаем движение каретки вверх
delay(1 * 1000); // пауза перед спуском
digitalWrite(20, 1); // начинаем движение каретки вниз
delay(1 * 1000);
}
if (digitalRead(10) == 0 && digitalRead(9) == 1) { // если ло 1 на выходе 9 и лог 0 на выходе 10, то каретка внизу, надо её остановить, сделать паузу, двигать вверх
digitalWrite(20, 0); // останавливаем движение вниз
delay(1 * 1000); // пауза в нижнем положении
digitalWrite(22, 1); // начинаем движение вверх
delay(1 * 1000);
}
}
Чёрт, а ведь вертелась какая-то мысль про эти выводы! Увидел эти 20 и 21, понял, что это наверное мега, и хотел ещё спросить - а правильно ли их там нашли? Но забыл!
Ладно, разобрались и хорошо!
Добрый день, опять я.
Старый проект забросил, теперь снова надо.
Код такой
void setup() {
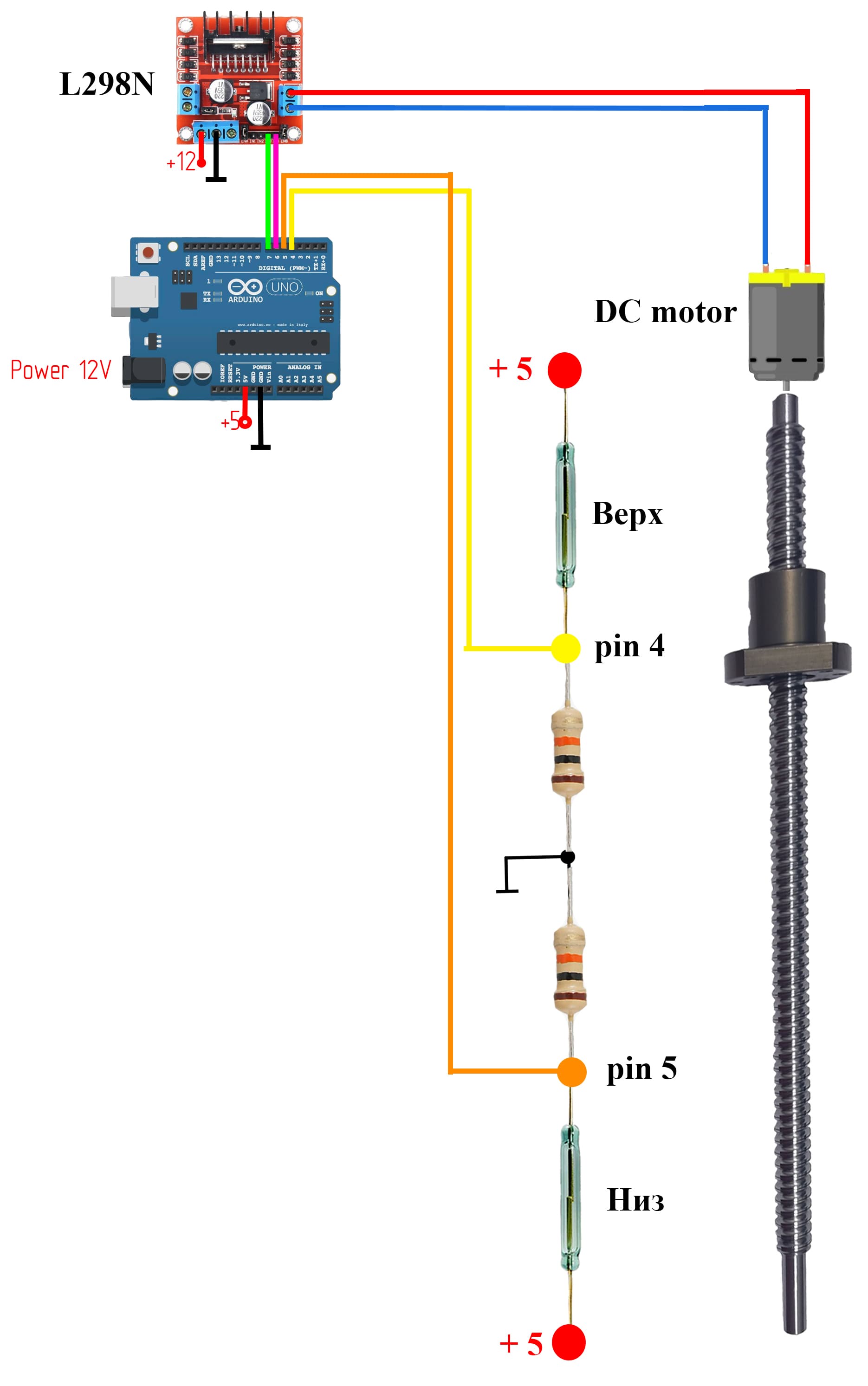
pinMode(4, INPUT); // вход от нижнего датчика
pinMode(5, INPUT); // вход от верхнего датчика
pinMode(6, OUTPUT); // лог 1 = движение вверх
pinMode(7, OUTPUT); // лог 1 = движение вниз
if (digitalRead(4) == 0 && digitalRead(5) == 0 ) { // если каретка не вверху и не внизу , то двигать вверх после паузы
delay(500); // пауза перед движением вверх
digitalWrite(6, 1); // едем в верх
}
}
void loop() {
if (digitalRead(4) == 1 && digitalRead(5) == 0) { // если есть лог 1 на выходе 4, и лог 0 на выходе 5, то каретка внизу, надо её остановить. сделать паузу и начать двигать вверх
digitalWrite(7, 0); // останавливаем движение каретки вниз
delay(10000); // пауза после остановки
digitalWrite(6, 1); // начинаем движение каретки вверх
}
if (digitalRead(4) == 0 && digitalRead(5) == 1) { // если ло 1 на выходе 5 и лог 0 на выходе 4, то каретка вверху, надо её остановить, сделать паузу, двигать вниз
digitalWrite(6, 0); // останавливаем движение каретки вверх
delay(20000); // пауза после полной остановки
digitalWrite(7, 1); // начинаем движение вверх
}
}
проблема в паузах, строки delay (10000) и delay (20000) конкретно в том, что если время перемещения каретки между датчиками меньше этой паузы (т.е. проезжает за время, которое меньше выставленной паузы) то сигнал на остановку двигателя не приходит и каретка уезжает совсем. Получается, как будто система не реагирует на датчики.
на всех датчиках стоят подключенные светодиоды и это четко видно. Что делать, подскажите, пожалуйста.
Могут срабатывать второй раз после команды на смену движения digitalWrite(6, 1); digitalWrite(7, 1);. Т.к. датчик может не успеть выключится. И в этом случае появится лишний delay.
Как вариант решения, можно добавить в if поверку направления движения.
Датчик не выключается при нахождении каретки в крайних положениях, т.е. он “включился” и будет включен пока каретка не поедет в обратную сторону (не выйдет из магнитного поля магнита закрепленного на каретке). и даже некоторе время после того как поедет все равно не выключится (милимметров 7-8) от крайнего положения. особенность герконов в том, что для срабатывания надо более сильное магнитное поле, чем для отпускания, т.е. если включился, то дребезга нет в пограничном состоянии.
Проверьте соединения(к примеру код не соответствует рисунку), и , исправность элементов схемы. Так же источники питания. Надёжно ли срабатывают герконы и работает драйвер.
Исходя из логики кода - движение должно остановиться на подходе к датчику, и не возобновляться на время паузы.
Длительность паузы роли не играет.
Постараюсь завтра сделать короткое видео как это работает с пояснениями.
Логика, конечно, работы очевидная, но что-то работает не так. Скорее всего я где-то косячу, просто со временем мысли и глаз замыливается и я сам не вижу, сторонний взгляд может СИЛЬНО помоч, ткнув носом в “детскую” проблему. Спасибо за отклик(и), очень признателен.
Как оказалось - да! Ну, оно не совсем пустое…
Не понравилось, то что написал. Решил удалить. Вместо текста написал del. Выругалось на три символа. Заключил del в угловые скобки - а оно вона как!
Оно внутри такое и сейчас
void setup() {
pinMode(4, INPUT); // вход от верхнего датчика
pinMode(5, INPUT); // вход от нижнего датчика
pinMode(6, OUTPUT); // лог 1 = движение вверх
pinMode(7, OUTPUT); // лог 1 = движение вниз
if (digitalRead(4) == 0 && digitalRead(5) == 0 ) { // если каретка не вверху и не внизу , то двигать вверх после паузы
delay(500); // пауза перед движением вверх
digitalWrite(6, 1); // едем в верх
}
}
void loop() {
if (digitalRead(4) == 1 && digitalRead(5) == 0) { // если есть лог 1 на выходе 4 и лог 0 на выходе 5, то каретка вверху, надо её остановить. сделать паузу и начать двигать вниз
digitalWrite(6, 0); // останавливаем движение каретки вверх
delay(1000); // пауза после остановки
digitalWrite(7, 1); // начинаем движение каретки вниз
}
if (digitalRead(4) == 0 && digitalRead(5) == 1) { // если есть лог 0 на выходе 4 и лог 1 на выходе 5, то каретка внизу, надо её остановить, сделать паузу, двигать вверх
digitalWrite(7, 0); // останавливаем движение каретки вниз
delay(1000); // пауза после полной остановки
digitalWrite(6, 1); // начинаем движение вверх
}
}
если паузы выставлены 1000 мсек( 1сек) то всё работает, вот видео как оно работает
Извините, как вставить видео на форуме не знаю, по ссылке (40 мб) https://cloud.mail.ru/public/DC99/ADCfpaRda
А если паузы выставлены, к примеру, 10 000 (10 сек) то каретка не останавливается. (160 мб)
Код тот же, только в цикле loop delay (10000) https://cloud.mail.ru/public/ujAg/fWBBhyGUv
Это плохо, что так и не поняли, что вам выше сказали, и не смогли исправить.
Вообще, использовать delay() - неудачное решение, т.к. датчики остаются “без присмотра”
Вот, чисто из интереса, подправил чуть ваш код, но не проверял, т.к. не где, да и времени маловато.Возможно надо будет немного подправить.
Спойлер
#define DEBONCE_TIME 40
#define OUT_OF_RANGE_TIME 500 // подобрать
const uint8_t ALARM_PIN = 2; //Светодиод сигнализации аварии
bool Up = false;
void setup() {
pinMode(4, INPUT); // вход от нижнего датчика
pinMode(5, INPUT); // вход от верхнего датчика
pinMode(6, OUTPUT); // лог 1 = движение вверх
pinMode(7, OUTPUT); // лог 1 = движение вниз
digitalWrite(6, LOW);
digitalWrite(7, LOW);
pinMode(ALARM_PIN, OUTPUT);
digitalWrite(ALARM_PIN, LOW);
if (digitalRead(4) == 0) { // если каретка не внизу , то двигать вверх после паузы
delay(DEBONCE_TIME);
if (digitalRead(4) == 0)
{
delay(500); // пауза перед движением вверх
digitalWrite(6, 1); // едем в верх 6,1 7, 0 вверх
Up = true;
}
}
}
void Alarm()
{
if(digitalRead(6))
digitalWrite(7, 1);//останавливаем мотор
else
digitalWrite(7, 0);
digitalWrite(ALARM_PIN, HIGH);//зажигаем аварийный светодиод
}
void loop() {
if (digitalRead(4) == 1 && !Up) { //ПРИЕХАЛИ - НИЗ! если есть лог 1 на выходе 4, и лог 0 на выходе 5, то каретка внизу, надо её остановить. сделать паузу и начать двигать вверх
delay(DEBONCE_TIME);//задержка, для антидребезга
if (digitalRead(4) == 1 && !Up)//простейший антидребезг
{
digitalWrite(7, 0); // останавливаем движение каретки вниз
delay(10000); // пауза после остановки
digitalWrite(6, 1); // начинаем движение каретки вверх
Up = true;
}
}
if (digitalRead(5) == 1 && Up) { //ПРИЕХАЛИ - ВЕРХ! если ло 1 на выходе 5 и лог 0 на выходе 4, то каретка вверху, надо её остановить, сделать паузу, двигать вниз
delay(DEBONCE_TIME);//
if (digitalRead(5) == 1 && Up)//
{
digitalWrite(6, 0); // останавливаем движение каретки вверх
delay(20000); // пауза после полной остановки
digitalWrite(7, 1); // начинаем движение ВНИЗ
Up = false;
}
}
//
if (digitalRead(4) == 1 && digitalRead(5) == 1)//Если некорректные значения
{
delay(DEBONCE_TIME);
if (digitalRead(4) == 1 && digitalRead(5) == 1)
{
Alarm(); //Авария
}
}
if((digitalRead(5) == 1 && !Up) || (digitalRead(4) == 1 && Up))//Если некорректные значения
{
delay(OUT_OF_RANGE_TIME); //(время уверенного отъезда от датчика)
if((digitalRead(5) == 1 && !Up) || (digitalRead(4) == 1 && Up))//после отъезда от датчика
{
Alarm();
}
}
}
Вчера пообщался с ИИ и он мне подсказал тоже самое, мол, delay использовать в программе это сплошное вредительство и надо немножко помассировать лицо тому, кто его пихает новичкам. Используй, говорит, millis.
unsigned long previousTime = 0; // Переменная для отслеживания времени
int pauseAtTop = 20000; // Пауза в верхней точке (в миллисекундах)
int pauseAtBottom = 5000; // Пауза в нижней точке (в миллисекундах)
bool isMovingUp = false; // Флаг, указывающий движение вверх
bool isMovingDown = false; // Флаг, указывающий движение вниз
void setup() {
pinMode(4, INPUT); // Вход от верхнего датчика
pinMode(5, INPUT); // Вход от нижнего датчика
pinMode(6, OUTPUT); // Лог 1 = движение вверх
pinMode(7, OUTPUT); // Лог 1 = движение вниз
if (digitalRead(4) == 0 && digitalRead(5) == 0) {
digitalWrite(6, 1); // Начинаем движение вверх
isMovingUp = true; // Устанавливаем флаг движения вверх
}
}
void loop() {
int topSensor = digitalRead(4); // Состояние верхнего датчика
int bottomSensor = digitalRead(5); // Состояние нижнего датчика
// Если каретка достигла верхней точки
if (topSensor == 1 && bottomSensor == 0) {
if (isMovingUp) { // Если двигались вверх
digitalWrite(6, 0); // Останавливаем движение вверх
isMovingUp = false; // Сбрасываем флаг движения вверх
previousTime = millis(); // Запоминаем время начала паузы
}
// Проверяем, прошло ли достаточно времени для паузы вверху
if (!isMovingDown && (millis() - previousTime >= pauseAtTop)) {
digitalWrite(7, 1); // Начинаем движение вниз
isMovingDown = true; // Устанавливаем флаг движения вниз
}
}
// Если каретка достигла нижней точки
if (topSensor == 0 && bottomSensor == 1) {
if (isMovingDown) { // Если двигались вниз
digitalWrite(7, 0); // Останавливаем движение вниз
isMovingDown = false; // Сбрасываем флаг движения вниз
previousTime = millis(); // Запоминаем время начала паузы
}
// Проверяем, прошло ли достаточно времени для паузы внизу
if (!isMovingUp && (millis() - previousTime >= pauseAtBottom)) {
digitalWrite(6, 1); // Начинаем движение вверх
isMovingUp = true; // Устанавливаем флаг движения вверх
}
}
}
вот полностью рабочий код с паузами по усмотрению пользователя.
Благодарю всех откликнувшихся, камни в мой огород пригодились, я построил забор