Попробовал поуправлять с компьютера с помощью утилиты ESS Tuner через адаптер USB/RS232 (CH340G). Всё работает.
Зафиксировал скорость передачи данных 38400N1, команду Modbus проснифферил. 01 06 00 1C 00 02 C9 CD - запуск вращения по команде Parameter28 = 2 - это все соответствует даташиту.
Попробовал Modbus-клиент на компьютере, передал эту команду через CH340G - работает.
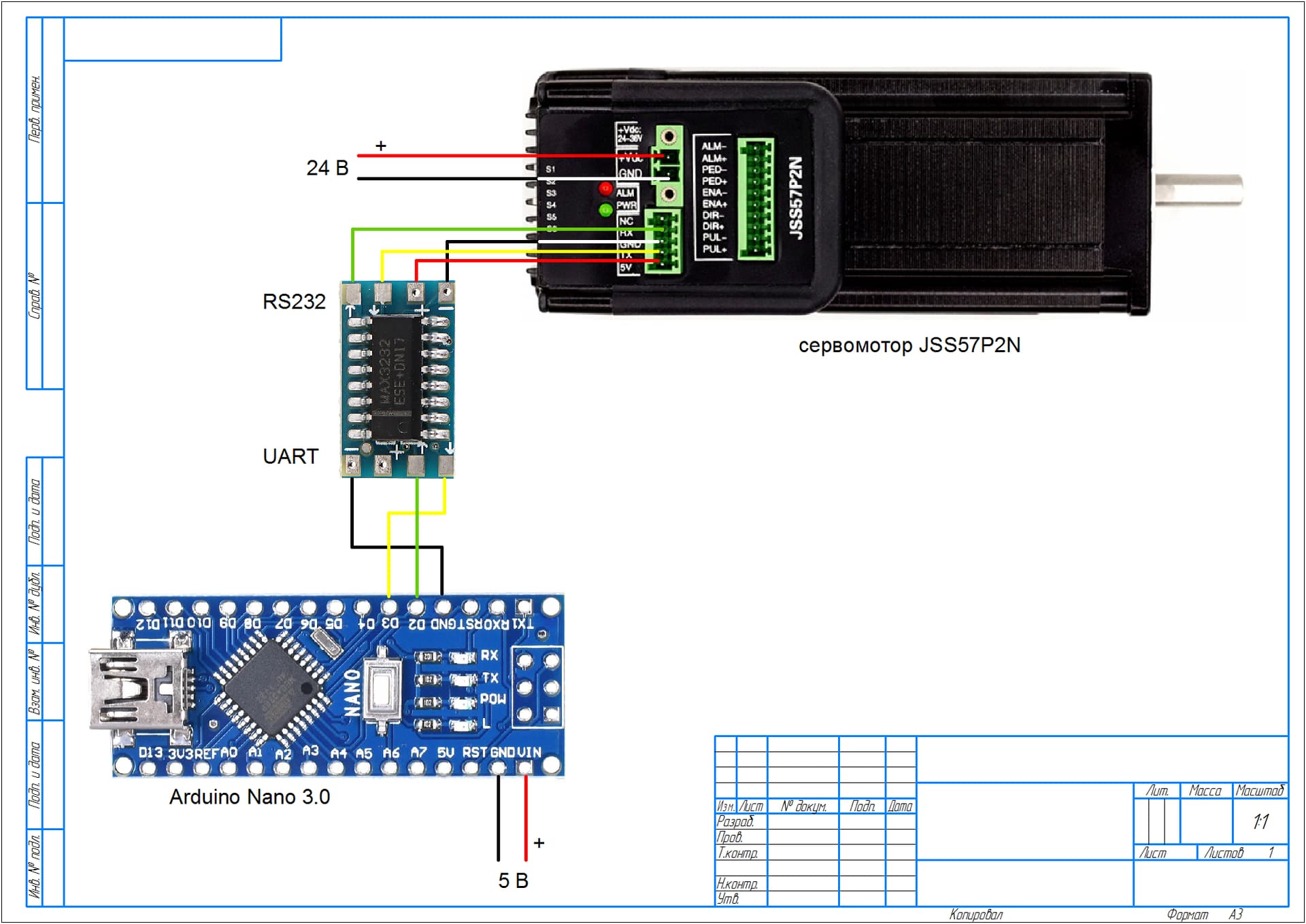
Взял Arduino Nano, пины 2 и 3 настроил как TX/RX, скорость 38400, команду подаю на шаговик через микруху SP3232EEN. Но шаговик не принимает команду.
Ладно, меряю напряжение на TX (RS232) минус 8,5 В - довольно приличный уровень. И передача вроде идет, каждую секунду напряжение проваливается до -8,1 В.
Подключил я этот RS232 к компьютеру через CH340G - он прекрасно видит ежесекундную передачу.
Я даже UART подключал к компьютеру через другой переходник, но это уже лишнее.
Поменял SP3232EEN на MAX3232, но это не помогло.
Ребят, подскажите, почему не работает RS232 от MAX3232? Никакой информации об уровнях напряжений в даташите на шаговик нет.
@Тайга
Так какая все-таки плата - классическая Нана или Нано ЕСП32? Если второе - почему на картинке в #7 обычная Нано?
И если у вас на плате два Уарт порта, зачем вам СофтСериал?