Добрый день! Уже кучу времени пытаюсь понять в чем проблема программы, но никак не удается выявить причину, надеюсь у кого то появятся идеи. Текст выйдет довольно большим, прошу набраться терпением =)
Есть два ардуино:
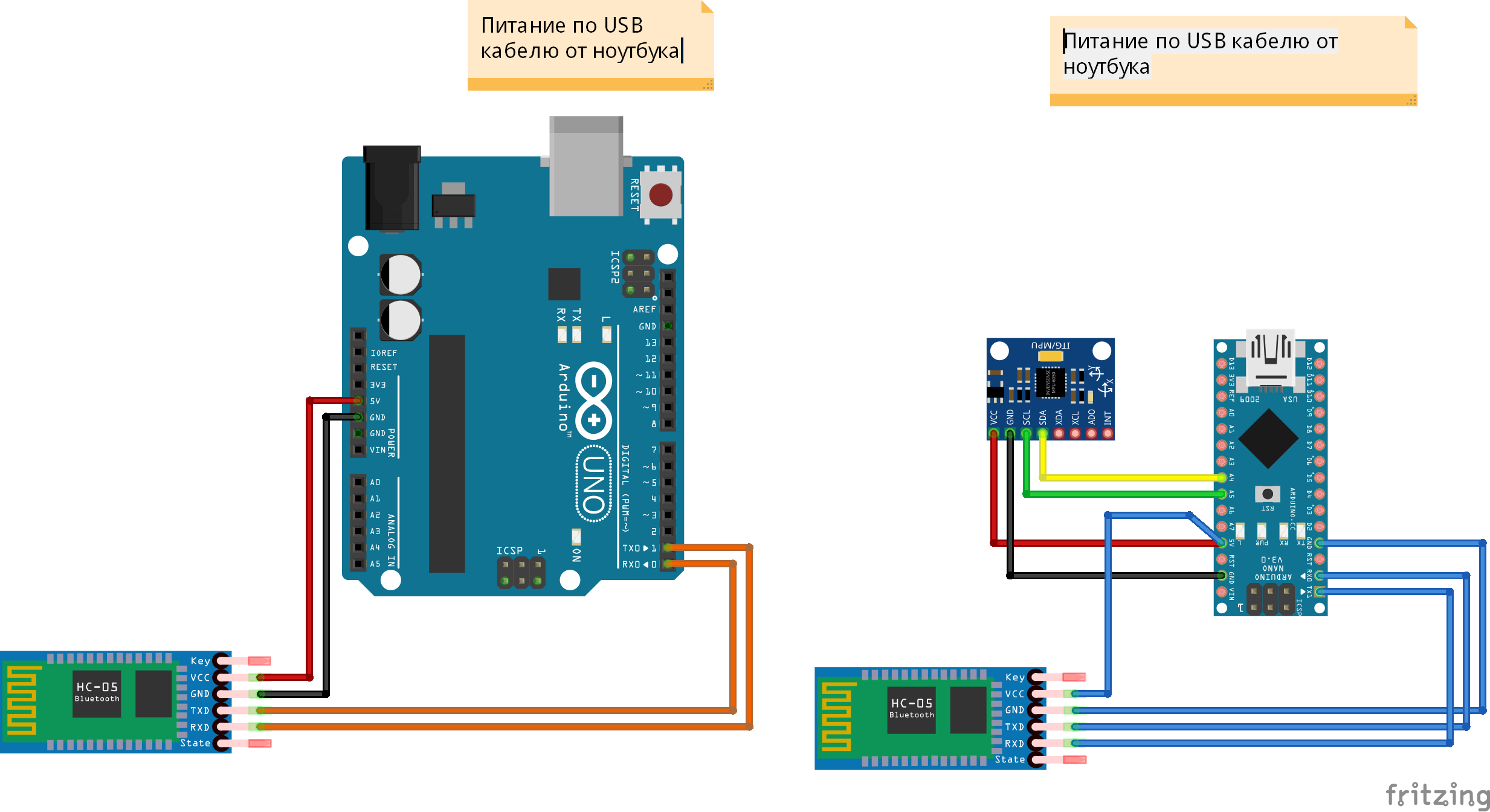
1 ардуино(отправляющая сторона NANO 168): arduino + HC-05 + MPU6050, ардуино берет данные с MPU и отправляет по bluetooth обработанные данные
2 ардуино(принимающая сторона UNO 328): arduino + HC-05, принимает данные от 1 ардуино и просто их выводит
Проблема
1 ардуино отсылает данные 2 ардуино, 2 ардуино показывает 4 значения типа float в COM-порте и вроде как все хорошо, но здесь появляются 2 пути:
-
- Путь 1 (шанс появления 90%):* через 5-20 секунд ардуино 2 перестает принимать данные и прекращает выводить новые значения, также после этого блютузы отсоединяются друг от друга и блютуз 2 ардуино входит опять в поиск устройства( он master), а у блютуза 1 ардуино выключаются светодиоды и все!
ВАЖНОЕ НАБЛЮДЕНИЕ РАБОТЫ СВЕТОДИОДОВ ДВУХ HC-05: когда система только включается, светодиоды двух блютузов в поиске (частое мигание красным светодиодом), когда они подключатся, то master не мигает никак, а slave мигает раз в 3 секунды, система работает, но через какое-то время, если master мигнет хоть 1 раз светодиодом, значит передача данных полностью останавливается и происходит то, что я описал выше когда они отсоединяются
- Путь 1 (шанс появления 90%):* через 5-20 секунд ардуино 2 перестает принимать данные и прекращает выводить новые значения, также после этого блютузы отсоединяются друг от друга и блютуз 2 ардуино входит опять в поиск устройства( он master), а у блютуза 1 ардуино выключаются светодиоды и все!
-
- Путь 2 (шанс появления 10%):* каким-то чудом эта система полностью работает ничего не отсоединяется и выводит значения так, как нужно
В коде по арудино 1 (смотри ниже), я думал, что когда идет быстрый опрос датчика MPU, HC-05 не справляется с такой скоростью и происходит какая-то рассинхронизация, я пробывал добавить отдельный цикл, где он отправляет не раз в 2мкс в основном цикле, а побольше времени ему давал, тогда он вообще ничего не отправляет и с MPU значений не принимает, как будто он заблокировал MPU и ничего не получает.
Отдельно я проверял как просто работу HC-05 (все хорошо они передают данные), так и только MPU6050 (тоже все хорошо, он работает), но как только я добавляю в код передачу данных возникает проблема.
Еще я заметил (может так и должно быть), что когда я решил посмотреть что выводит арудино 1 без кода о передаче данных он выводит нормальные значения

А когда с кодом о передаче данных

Монтажная схема:
P.S. Когда я работал с блютузами версии 3.0, то если они подключаются друг к другу и идет нормальная передача данных, то они синхронно мигают красным светодиодом, сейчас я работаю с версией 5.0, тут похоже после подключения master не мигает, а slave мигает раз в 3 секунды
КОД АРДУИНО 1
#include "I2Cdev.h"
#include "MPU6050.h"
#include <EasyTransfer.h>
#define TO_DEG 57.2957f
#define TIME_GYRO 2000 // период опроса mpu6050 в микросекундах
MPU6050 accgyro;
// ------------------------ BLUETOOTH ----------------------------
struct SEND_DATA_STRUCTURE {
float tax;
float tay;
float tgx;
float tgy;
};
SEND_DATA_STRUCTURE data;
EasyTransfer ETin, ETout; // 2 объекта ИзиТрансфера 1 для отправки и 1 получения информации
// ----------------------------------------------------
int16_t ax_raw, ay_raw, az_raw, gx_raw, gy_raw, gz_raw; // сырые данные в кодах АЦП (3 ускорения и 3 скорости)
long int time_timer=0; // переменная таймера для опроса
long int timerBT=1000;
// ------------------------ АКСЕЛЕРОМЕТР ----------------------------
float ax, ay, az; // значения ускорения в единицах гравитации g
float angle_ax, angle_ax1, angle_ay, angle_az; // углы, рассчитанные по акселерометру
// ------------------------ ГИРОСКОП ----------------------------
float gx, gy, gz; // значения угловой скорости в градусах в секунду
float angle_gx, angle_gy, angle_gz; // углы, рассчитанные по гироскопу
float gyro_x_zero, gyro_y_zero, gyro_z_zero; // калибровочные углы смещения нуля гироскопа
// ------------------------ ФИЛЬТР ----------------------------
float angle_fx, angle_fy, angle_fz; //угол после обработки комплементарным фильтром
void setup() {
Serial.begin(19200);
//Serial.println("x, y, gx, gy");
ETout.begin(details(data), &Serial);
delay(5000);
accgyro.initialize();
calibrateMPU();
}
void loop() {
if( time_timer < micros() ){
time_timer = micros() + TIME_GYRO;
accgyro.getMotion6(&ax_raw, &ay_raw, &az_raw, &gx_raw, &gy_raw, &gz_raw);
getAngleAcsel(); // функция получения углов angle_ax, angle_ay, angle_az по акселерометру
getAngleGyro(); // функция получения углов angle_gx, angle_gy, angle_gz по гироскопу
getAngleFiltr(); // функция получения углов angle_fx, angle_fy, angle_fz с применением фильтра (по сути суммирует углы акселерометра и гироскопа)
data.tax=angle_fx;
data.tay=angle_fy;
data.tgx=gx;
data.tgy=gy;
ETout.sendData();
}
}
КОД АРДУИНО 2
#include <EasyTransfer.h>
struct RECEIVE_DATA_STRUCTURE {
float tax;
float tay;
float tgx;
float tgy;
};
RECEIVE_DATA_STRUCTURE data;
EasyTransfer ETin,ETout;
void setup() {
Serial.begin(19200);
Serial.println("ax, ay, gx, gy");
ETin.begin(details(data), &Serial);
delay(4000);
//Serial.flush();
}
void loop() {
if(ETin.receiveData()) {
Serial.print(data.tax);
Serial.print(' ');
Serial.print(data.tay);
Serial.print(' ');
Serial.print(data.tgx);
Serial.print(' ');
Serial.println(data.tgy);
}
}