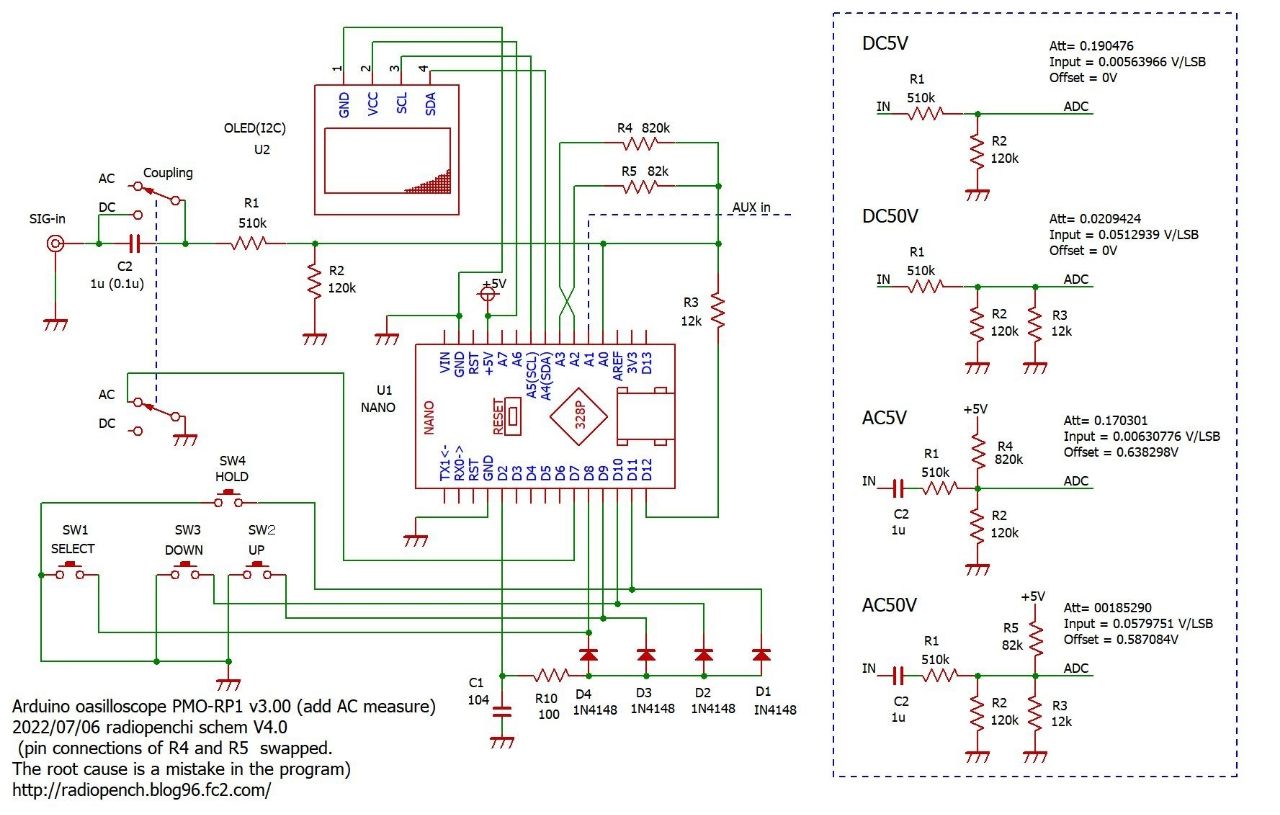
Есть скетч для осциллографа на Arduino Nano. Суть в том что в скетче как я понял есть тонкая настройка регистров и соответственно он не подходит для Arduino Nano Every. Может поможет кто поправить код чтоб работал на ней. Схему тоже прикреплю. Заранее спасибо ![]()
#include <Wire.h>
#include <Adafruit_GFX.h>
//#include <Adafruit_SSD1306.h>
#include <Adafruit_SH1106.h> // https://github.com/wonho-maker/Adafruit_SH1106
#include <EEPROM.h>
#define SCREEN_WIDTH 128 // OLED display width
#define SCREEN_HEIGHT 64 // OLED display height
#define REC_LENG 200 // size of wave data buffer
#define MIN_TRIG_SWING 5 // minimum trigger swing.(Display "Unsync" if swing smaller than this value
// Declaration for an SSD1306 display connected to I2C (SDA, SCL pins)
#define OLED_RESET -1 // Reset pin # (or -1 if sharing Arduino reset pin)
//Adafruit_SSD1306 oled(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET); // device name is oled
Adafruit_SH1106 oled(OLED_RESET); // use this when SH1106
#define R_12k 12 // ピン12の12kオーム
#define R_820k 16 // (16=A2ピン) 820k ohm for AC low range
#define R_82k 17 // (17=A3ピン) 82k omm for AC Hi range
// Range name table (those are stored in flash memory)
const char vRangeName[10][5] PROGMEM = {"A50V", "A 5V", " 50V", " 20V", " 10V", " 5V", " 2V", " 1V", "0.5V", "0.2V"}; // Vertical display character (number of characters including \ 0 is required)
const char * const vstring_table[] PROGMEM = {vRangeName[0], vRangeName[1], vRangeName[2], vRangeName[3], vRangeName[4], vRangeName[5], vRangeName[6], vRangeName[7], vRangeName[8], vRangeName[9]};
const char hRangeName[12][6] PROGMEM = {"200ms", "100ms", " 50ms", " 20ms", " 10ms", " 5ms", " 2ms", " 1ms", "500us", "200us", "100us", " 50us"}; // Hrizontal display characters
const char * const hstring_table[] PROGMEM = {hRangeName[0], hRangeName[1], hRangeName[2], hRangeName[3], hRangeName[4], hRangeName[5], hRangeName[6], hRangeName[7], hRangeName[8], hRangeName[9], hRangeName[10], hRangeName[11]};
const PROGMEM float hRangeValue[] = { 0.2, 0.1, 0.05, 0.02, 0.01, 0.005, 0.002, 0.001, 0.5e-3, 0.2e-3, 0.2e-3, 0.2e-3}; // record speed in second. ( = 25pix on screen) this value used for freq calc.
int waveBuff[REC_LENG]; // wave form buffer (RAM remaining capacity is barely)
char chrBuff[8]; // display string buffer
char hScale[] = "xxxAs"; // horizontal scale character
char vScale[] = "xxxx"; // vartical scale
float lsb5V = 0.00563965; // DC感度(5V)sensivity coefficient of 5V range. std=0.00563965 1.1*630/(1024*120)
float lsb50V = 0.0512939; // (50V)sensivity coefficient of 50V range. std=0.0512939 1.1*520.91/(1024*10.91)
float lsb5Vac = 0.00630776; // AC感度(5V)、1LSBあたりの電圧(V) std=0.00630776 V/LSB
float lsb50Vac = 0.0579751; // AC感度(50V)、1LSBあたりの電圧(V) std=0.0579751 V/LSB
volatile int vRange; // V-range number 2:50V, 3:20V, 4:10V, 5:5V, 6:2V, 7:1V, 8:0.5V, 9:0.2V
volatile int hRange; // H-range nubmer 0:200ms, 1:100ms, 2:50ms, 3:20ms, 4:10ms, 5:5ms, 6;2ms, 7:1ms, 8:500us, 9;200us
volatile int trigD; // trigger slope flag, 0:positive 1:negative
volatile int scopeP; // operation scope position number. 0:Veratical, 1:Hrizontal, 2:Trigger slope
volatile boolean hold = false; // hold flag
volatile boolean switchPushed = false; // flag of switch pusshed !
volatile int saveTimer; // remaining time for saving EEPROM
int timeExec; // approx. execution time of current range setting (ms)
int dataMin; // buffer minimum value (smallest=0)
int dataMax; // maximum value (largest=1023)
int dataAve; // 10 x average value (use 10x value to keep accuracy. so, max=10230)
int dataRms; // 10x rms. value
int rangeMax; // buffer value to graph full swing
int rangeMin; // buffer value of graph botto
int rangeMaxDisp; // display value of max. (100x value)
int rangeMinDisp; // display value if min.
int trigP; // trigger position pointer on data buffer
boolean trigSync; // flag of trigger detected
int att10x; // 10x attenetor ON (effective when 1)
int inMode; // 入力モード 0=DC+, 1=DC+-, 2=AC
int offset5Vac;
int offset50Vac;
float waveFreq; // frequency (Hz)
float waveDuty; // duty ratio (%)
// Битовая карта логотипа (убедитесь, что размеры соответствуют вашему дисплею!)
static const unsigned char PROGMEM logo16_glcd_bm[] = {
0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00111111, 0b00000000, 0b00000011, 0b11111111, 0b11111111, 0b11111111, 0b11111100, 0b01111111, 0b11111111, 0b11111111, 0b11111111, 0b11111111, 0b11111111, 0b11111111, 0b11111111, 0b11111110,
0b01111111, 0b10000000, 0b00000111, 0b11111111, 0b11111111, 0b11111111, 0b11111110, 0b01111111, 0b11111111, 0b11111111, 0b11111111, 0b11111111, 0b11111111, 0b11111111, 0b11111111, 0b11111110,
0b01110011, 0b10000000, 0b00000111, 0b00111110, 0b00000000, 0b00000110, 0b00000111, 0b01111100, 0b11111011, 0b11100111, 0b00000111, 0b11111111, 0b10000000, 0b00111000, 0b00111000, 0b00000110,
0b01011110, 0b10000000, 0b00000101, 0b11101111, 0b11111111, 0b11111111, 0b11111101, 0b01111100, 0b11111011, 0b11100111, 0b00000111, 0b11111111, 0b10000000, 0b00111000, 0b00111000, 0b00000110,
0b01001100, 0b10000000, 0b00000100, 0b11001101, 0b10000110, 0b00000000, 0b00001001, 0b01111011, 0b00111011, 0b11100100, 0b11111001, 0b11111111, 0b11111111, 0b00100111, 0b11001011, 0b11111110,
0b01001100, 0b10000000, 0b00000100, 0b11001101, 0b10111111, 0b11111111, 0b11001001, 0b01111011, 0b00111011, 0b11100100, 0b11111001, 0b11111111, 0b11111111, 0b00100111, 0b11001011, 0b11111110,
0b01001100, 0b10000000, 0b00000100, 0b11001101, 0b10011111, 0b11111111, 0b11001001, 0b01100111, 0b11001000, 0b11100100, 0b11111001, 0b11111111, 0b11111110, 0b01111111, 0b11001000, 0b00001110,
0b01001100, 0b10000000, 0b00000100, 0b11011101, 0b10111110, 0b01111111, 0b11001001, 0b01100111, 0b11001011, 0b00100100, 0b11111001, 0b00000000, 0b01111000, 0b01111000, 0b00111111, 0b11100110,
0b01001100, 0b10000000, 0b00000100, 0b11111101, 0b10110010, 0b01110110, 0b11001011, 0b01100111, 0b11001011, 0b00100100, 0b11111001, 0b00000000, 0b01111000, 0b01111000, 0b00111111, 0b11100110,
0b01001100, 0b10000000, 0b00000100, 0b11101101, 0b10010010, 0b00110010, 0b11001111, 0b01100000, 0b00001011, 0b11000100, 0b11111001, 0b11111111, 0b11111111, 0b00100111, 0b11111111, 0b11100110,
0b01001100, 0b10000000, 0b00000100, 0b11001101, 0b10110000, 0b00100000, 0b11001101, 0b01100000, 0b00001011, 0b11000100, 0b11111001, 0b11111111, 0b11111111, 0b00100111, 0b11111111, 0b11100110,
0b01001111, 0b10000000, 0b00001100, 0b11001101, 0b11110000, 0b00100001, 0b11001001, 0b01100111, 0b11001011, 0b11100100, 0b11111001, 0b11111111, 0b10011111, 0b00100111, 0b11110011, 0b11100110,
0b01011001, 0b10000000, 0b00011100, 0b11001111, 0b01110000, 0b00000111, 0b10001001, 0b01100111, 0b11001011, 0b11100100, 0b11111001, 0b11111111, 0b10011111, 0b00100111, 0b11110011, 0b11100110,
0b01010011, 0b10000000, 0b00111001, 0b10001110, 0b01110000, 0b00011110, 0b00111001, 0b01100111, 0b11001011, 0b11100111, 0b00000111, 0b11111111, 0b11100000, 0b01100000, 0b00001100, 0b00001110,
0b01110111, 0b10000000, 0b01111011, 0b00111111, 0b11110000, 0b00111000, 0b11101001, 0b01111111, 0b11111111, 0b11111111, 0b11111111, 0b11111111, 0b11111111, 0b11111111, 0b11111111, 0b11111110,
0b01101110, 0b00000000, 0b11111110, 0b01111111, 0b11100000, 0b11110011, 0b10001001, 0b01111111, 0b11111111, 0b11111111, 0b11111111, 0b11111111, 0b11111111, 0b11111111, 0b11111111, 0b11111110,
0b01111010, 0b00011101, 0b10011100, 0b11111111, 0b11100011, 0b10111110, 0b00001001, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00111010, 0b00111111, 0b00011001, 0b11101001, 0b00001110, 0b00111000, 0b11001001, 0b00000000, 0b00000000, 0b00000001, 0b11111000, 0b01111110, 0b00000011, 0b10000000, 0b00000000, 0b00000000,
0b00000000, 0b01100010, 0b00110011, 0b11000001, 0b00111100, 0b11100011, 0b11001001, 0b00000000, 0b00000000, 0b00000001, 0b11111110, 0b01111111, 0b10001111, 0b11100000, 0b00000000, 0b00000000,
0b00000010, 0b11000000, 0b01101111, 0b01000001, 0b11111011, 0b10001111, 0b11001001, 0b00000000, 0b00000000, 0b00000001, 0b10000110, 0b01100001, 0b10011100, 0b01110000, 0b00000000, 0b00000000,
0b00000011, 0b10011111, 0b11100111, 0b01000001, 0b11011110, 0b00111111, 0b11101001, 0b00000000, 0b00000000, 0b00000001, 0b10000010, 0b01100001, 0b10011000, 0b00110000, 0b00000000, 0b00000000,
0b00000111, 0b00110000, 0b01110011, 0b11000111, 0b00011100, 0b11111111, 0b11111001, 0b00000000, 0b00000000, 0b00000001, 0b11111110, 0b01111111, 0b10111000, 0b00111000, 0b00000000, 0b00000000,
0b00001110, 0b01110011, 0b00111000, 0b11001100, 0b01110011, 0b11111111, 0b11011001, 0b00000000, 0b00000000, 0b00000001, 0b11111110, 0b01111111, 0b00110000, 0b00011000, 0b00000000, 0b00000000,
0b00011010, 0b11110111, 0b10111100, 0b01101101, 0b11001111, 0b10110001, 0b11001001, 0b00000000, 0b00000000, 0b00000001, 0b10000000, 0b01100110, 0b00111000, 0b00111000, 0b00000000, 0b00000000,
0b00110111, 0b10111111, 0b11110110, 0b00111101, 0b10011111, 0b00101000, 0b11001001, 0b00000000, 0b00000000, 0b00000001, 0b10000000, 0b01100011, 0b00011000, 0b00110000, 0b00000000, 0b00000000,
0b01100110, 0b00111110, 0b11110011, 0b00011101, 0b10110110, 0b10100000, 0b11001001, 0b00000000, 0b00000000, 0b00000001, 0b10000000, 0b01100011, 0b10011100, 0b01110000, 0b00000000, 0b00000000,
0b01001100, 0b01111111, 0b11111001, 0b10001101, 0b10010000, 0b10000000, 0b11001011, 0b00000000, 0b00000000, 0b00000001, 0b10000000, 0b01100001, 0b10001111, 0b11100000, 0b00000000, 0b00000000,
0b01001101, 0b11101101, 0b10011100, 0b10111101, 0b10110000, 0b00000000, 0b11001011, 0b00000000, 0b00000000, 0b00000001, 0b10000000, 0b01100001, 0b11000011, 0b10000000, 0b00000000, 0b00000000,
0b01001101, 0b11100000, 0b10101100, 0b11111101, 0b10110000, 0b00000000, 0b11001111, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b01001101, 0b11000000, 0b10100100, 0b11001101, 0b11110000, 0b00000000, 0b11001101, 0b00000011, 0b10100010, 0b01111001, 0b11110000, 0b11000111, 0b10001111, 0b00000111, 0b11001100, 0b00100000,
0b01001101, 0b10000000, 0b00000100, 0b10001101, 0b11110000, 0b00000000, 0b11001001, 0b00000011, 0b10100010, 0b01111001, 0b11110000, 0b11000111, 0b10001111, 0b00000111, 0b11001100, 0b00100000,
0b01001101, 0b10000000, 0b00000100, 0b10001101, 0b10010000, 0b00000000, 0b11001001, 0b00001100, 0b00100010, 0b01000101, 0b10001011, 0b00110100, 0b01100110, 0b00000110, 0b00100010, 0b11000000,
0b01001001, 0b10000000, 0b00000100, 0b10001101, 0b10110000, 0b00000000, 0b11001001, 0b00000010, 0b00100010, 0b01111001, 0b11110011, 0b00110111, 0b10000110, 0b00000111, 0b11000001, 0b00000000,
0b01001001, 0b10000000, 0b00000100, 0b11001101, 0b10110000, 0b00000000, 0b11011001, 0b00000001, 0b10100010, 0b01000001, 0b10000011, 0b00110100, 0b01100110, 0b00000110, 0b00100001, 0b00000000,
0b01011101, 0b10000000, 0b00000101, 0b11101101, 0b10010000, 0b00000000, 0b11011111, 0b00000001, 0b10100010, 0b01000001, 0b10000011, 0b00110100, 0b01100110, 0b00000110, 0b00100001, 0b00000000,
0b01110111, 0b10000000, 0b00000111, 0b00111101, 0b10110000, 0b00000000, 0b11110111, 0b00001110, 0b00011100, 0b01000001, 0b10000000, 0b11000100, 0b01100110, 0b00000111, 0b11000001, 0b00000000,
0b01110011, 0b10000000, 0b00000111, 0b00111111, 0b10110000, 0b00000000, 0b01111111, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00111111, 0b00000000, 0b00000011, 0b11111110, 0b11010000, 0b00000000, 0b01111110, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00111100, 0b00000000, 0b00000011, 0b11111111, 0b01110000, 0b00000000, 0b00111100, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00011100, 0b00000000, 0b00000001, 0b11101001, 0b11110000, 0b00000000, 0b00011100, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00001100, 0b00000000, 0b00000010, 0b11101001, 0b11100000, 0b00000000, 0b00111000, 0b00000011, 0b11000011, 0b10011111, 0b00110011, 0b10001111, 0b00011110, 0b11001100, 0b11101100, 0b01000000,
0b00101100, 0b00000000, 0b00000010, 0b11001000, 0b10000000, 0b00000000, 0b00110100, 0b00000010, 0b00100100, 0b01011000, 0b10110100, 0b01101000, 0b10010000, 0b11101101, 0b00001100, 0b01000000,
0b00001000, 0b00000000, 0b00000000, 0b11001000, 0b10000000, 0b00000000, 0b00010100, 0b00000011, 0b11000111, 0b11011000, 0b10110100, 0b01101111, 0b00011110, 0b11011101, 0b00001111, 0b11000000,
0b00001000, 0b00000000, 0b00000000, 0b10000000, 0b10000000, 0b00000000, 0b00010000, 0b00000011, 0b11000111, 0b11011000, 0b10110100, 0b01101111, 0b00011110, 0b11011101, 0b00001111, 0b11000000,
0b00001000, 0b00000000, 0b00000000, 0b10000000, 0b10000000, 0b00000000, 0b00011000, 0b00000010, 0b00100100, 0b01011000, 0b10110100, 0b01101000, 0b00010000, 0b11001101, 0b00001100, 0b01000000,
0b00001000, 0b00000000, 0b00000000, 0b10000000, 0b10000000, 0b00000000, 0b00001000, 0b00000010, 0b00100100, 0b01011111, 0b00110011, 0b10001000, 0b00011110, 0b11001100, 0b11101100, 0b01000000,
0b00001000, 0b00000000, 0b00000000, 0b10000000, 0b10000000, 0b00000000, 0b00000000, 0b00000010, 0b00100100, 0b01011111, 0b00110011, 0b10001000, 0b00011110, 0b11001100, 0b11101100, 0b01000000,
0b00001000, 0b00000000, 0b00000000, 0b00000000, 0b10000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b10000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000,
};
void setup() {
pinMode(2, INPUT_PULLUP); // button pussed interrupt (int.0 IRQ)
pinMode(7, INPUT_PULLUP); // *ACモード
pinMode(8, INPUT_PULLUP); // Select button
pinMode(9, INPUT_PULLUP); // Up
pinMode(10, INPUT_PULLUP); // Down
pinMode(11, INPUT_PULLUP); // Hold
pinMode(13, OUTPUT); // LED
pinMode(R_12k, INPUT); // pin12 1/10 attenuator(Off=High-Z, Enable=Output Low)
pinMode(R_820k, INPUT); // A2
pinMode(R_82k, INPUT); // A3
uuPinOutputLow(0b00000001111000,0b000000); // output low at pin D3-D6
// oled.begin(SSD1306_SWITCHCAPVCC, 0x3C); // select 3C or 3D (set your OLED I2C address)
oled.begin(SH1106_SWITCHCAPVCC, 0x3C); // use this when SH1106
auxFunctions(); // Voltage measure (never return)
loadEEPROM(); // read last settings from EEPROM
analogReference(INTERNAL); // ADC full scale = 1.1V
attachInterrupt(0, pin2IRQ, FALLING); // activate IRQ at falling edge mode
drawBitmap(logo16_glcd_bm); // display start message
}
void loop() {
setInputOffset(); // coupling mode set(AC/DC)
setConditions(); // set measurment conditions
digitalWrite(13, HIGH); // flash LED
readWave(); // read wave form and store into buffer memory
digitalWrite(13, LOW); // stop LED
setConditions(); // set measurment conditions again (reflect change during measure)
dataAnalize(); // analize data
writeCommonImage(); // write fixed screen image (2.6ms)
plotData(); // plot waveform (10-18ms)
dispInf(); // display information (6.5-8.5ms)
oled.display(); // send screen buffer to OLED (37ms)
saveEEPROM(); // save settings to EEPROM if necessary
while (hold == true) { // wait if Hold flag ON
dispHold();
if (inMode > 0) { // DCモード以外だったら if DC mode,
if (acZero() == 1) { // オフセット調整が実行されたら if offset adj. executed
scopeP = 0; // SELECTのスコープ位置を垂直感度に戻す scope position to vartical
hold = false; // ホールド解除 cancel hold
}
delay(10);
} //
}
}
int acZero() { // ACレンジオフセット補正 cancel AC renge offset
if (digitalRead(8) == LOW) { // SELECT が押されたら if select pushed
if (vRange >= 5) { // レンジが5V以下なら、range = 5V or less
offset5Vac = dataAve / 10; // オフセット値を修正 adjust the offset
} else { // 10V以上なら range more than 5V
offset50Vac = dataAve / 10; // オフセット値を修正 adjust the offset
}
saveEEPROM(); // 補正量をEEPROMに保存
return 1; // 修正あり adjusted
}
return 0; // 修正無し no adjust
}
void setInputOffset() { // 入力カップリングに対応したオフセットの設定 set offset circuit
if (inMode >= 1) { // モード1,2(オフセット使用)なら if AC mode
if (att10x == 1) { // 10xアッテネータ使用なら 10X-att enabled
pull5V(R_82k); // 82kΩで5Vに引っ張る pull 5V by 82k
hiZ(R_820k);
} else { // 10xアッテネータ無しなら 10X-att disable
hiZ(R_82k);
pull5V(R_820k); // 820kΩで5Vに引っ張る pull 5V by 820k
}
} else { // モード0(オフセット無し)なら DC mode
hiZ(R_820k); // Hi-Z
hiZ(R_82k); // Hi-Z
}
}
void hiZ(int n) { // 指定ピンをHi-Zに設定 set the pin to hi-z
pinMode(n, INPUT); // 入力にして set INPUT
digitalWrite(n, LOW); // 念のためにプルアップを解除 no pull up
}
void pull5V(int n) { // 指定ピンを抵抗経由で5Vに引っ張る pull 5V through registor
pinMode(n, OUTPUT); // 出力にして set OUTPUT
digitalWrite(n, HIGH); // HIGHを出力 OUTPUT HIGH
}
void pullGND(int n) { // 指定ピンを抵抗経由でGNDに引っ張る pull GND through registor
pinMode(n, OUTPUT); // 出力にして set OUTPUT
digitalWrite(n, LOW); // LOWを出力 output LOW
}
void setConditions() { // 測定条件の設定 measuring condition setting
if (digitalRead(7) == LOW) { // 入力モードスイッチの状態を読んで、LOWだったら、set AC/DC
inMode = 1; // ACモード
} else {
inMode = 0; // DCモード
}
// get range name from PROGMEM
strcpy_P(hScale, (char*)pgm_read_word(&(hstring_table[hRange]))); // H range name
strcpy_P(vScale, (char*)pgm_read_word(&(vstring_table[vRange]))); // V range name
switch (vRange) { // setting of Vrange
case 0: // 削除した、delaeted Auto50V range
att10x = 1; // use input attenuator
break;
case 1: // 削除した、delaeted Auto 5V range
att10x = 0; // no attenuator
break;
case 2: // 50V range
if (inMode == 0) {
rangeMax = 50.0 / lsb50V; // set full scale pixcel count number
rangeMaxDisp = 5000; // vartical scale (set100x value)
rangeMin = 0;
rangeMinDisp = 0;
} else {
rangeMax = offset50Vac + 25.0 / lsb50Vac; // set full scale pixcel count number
rangeMaxDisp = 2500; // vartical scale (set100x value)
rangeMin = offset50Vac - 25.0 / lsb50Vac;
rangeMinDisp = -2500;
}
att10x = 1; // use input attenuator
break;
case 3: // 20V range
if (inMode == 0) {
rangeMax = 20.0 / lsb50V; // set full scale pixcel count number
rangeMaxDisp = 2000;
rangeMin = 0;
rangeMinDisp = 0;
} else {
rangeMax = offset50Vac + 10.0 / lsb50Vac; // set full scale pixcel count number
rangeMaxDisp = 1000;
rangeMin = offset50Vac - 10.0 / lsb50Vac;
rangeMinDisp = -1000;
}
att10x = 1; // use input attenuator
break;
case 4: // 10V range
if (inMode == 0) {
rangeMax = 10.0 / lsb50V; // set full scale pixcel count number
rangeMaxDisp = 1000;
rangeMin = 0;
rangeMinDisp = 0;
} else {
rangeMax = offset50Vac + 5.0 / lsb50Vac; // set full scale pixcel count number
rangeMaxDisp = 500;
rangeMin = offset50Vac - 5.0 / lsb50Vac;
rangeMinDisp = -500;
}
att10x = 1; // use input attenuator
break;
case 5: // 5V range
if (inMode == 0) {
rangeMax = 5.0 / lsb5V; // set full scale pixcel count number
rangeMaxDisp = 500;
rangeMin = 0;
rangeMinDisp = 0;
} else {
rangeMax = offset5Vac + 2.5 / lsb5Vac; // set full scale pixcel count number
rangeMaxDisp = 250;
rangeMin = offset5Vac - 2.5 / lsb5Vac;
rangeMinDisp = -250;
}
att10x = 0; // no input attenuator
break;
case 6: // 2V range
if (inMode == 0) {
rangeMax = 2.0 / lsb5V; // set full scale pixcel count number
rangeMaxDisp = 200;
rangeMin = 0;
rangeMinDisp = 0;
} else {
rangeMax = offset5Vac + 1.0 / lsb5Vac; // set full scale pixcel count number
rangeMaxDisp = 100;
rangeMin = offset5Vac - 1.0 / lsb5Vac;
rangeMinDisp = -100;
}
att10x = 0; // no input attenuator
break;
case 7: // 1V range
if (inMode == 0) {
rangeMax = 1.0 / lsb5V; // set full scale pixcel count number
rangeMaxDisp = 100;
rangeMin = 0;
rangeMinDisp = 0;
} else {
rangeMax = offset5Vac + 0.5 / lsb5Vac; // set full scale pixcel count number
rangeMaxDisp = 50;
rangeMin = offset5Vac - 0.5 / lsb5Vac;
rangeMinDisp = -50;
}
att10x = 0; // no input attenuator
break;
case 8: // 0.5V range
if (inMode == 0) {
rangeMax = 0.5 / lsb5V; // set full scale pixcel count number
rangeMaxDisp = 50;
rangeMin = 0;
rangeMinDisp = 0;
} else {
rangeMax = offset5Vac + 0.25 / lsb5Vac; // set full scale pixcel count number
rangeMaxDisp = 25;
rangeMin = offset5Vac - 0.25 / lsb5Vac;
rangeMinDisp = -25;
}
att10x = 0; // no input attenuator
break;
case 9: // 0.2V range
if (inMode == 0) {
rangeMax = 0.2 / lsb5V; // set full scale pixcel count number
rangeMaxDisp = 20;
rangeMin = 0;
rangeMinDisp = 0;
} else {
rangeMax = offset5Vac + 0.1 / lsb5Vac; // set full scale pixcel count number
rangeMaxDisp = 10;
rangeMin = offset5Vac - 0.1 / lsb5Vac;
rangeMinDisp = -10;
}
att10x = 0; // no input attenuator
break;
}
}
void writeCommonImage() { // 共通画像の作画 Common screen image drawing
oled.clearDisplay(); // 全クリア erase all(0.4ms)
oled.setTextColor(WHITE); // write in white character
oled.drawFastVLine(26, 9, 55, WHITE); // left vartical line
oled.drawFastVLine(127, 9, 3, WHITE); // right vrtical line up
oled.drawFastVLine(127, 61, 3, WHITE); // right vrtical line bottom
oled.drawFastHLine(24, 9, 7, WHITE); // Max value auxiliary mark
oled.drawFastHLine(24, 36, 2, WHITE);
oled.drawFastHLine(24, 63, 7, WHITE);
oled.drawFastHLine(51, 9, 3, WHITE); // Max value auxiliary mark
oled.drawFastHLine(51, 63, 3, WHITE);
oled.drawFastHLine(76, 9, 3, WHITE); // Max value auxiliary mark
oled.drawFastHLine(76, 63, 3, WHITE);
oled.drawFastHLine(101, 9, 3, WHITE); // Max value auxiliary mark
oled.drawFastHLine(101, 63, 3, WHITE);
oled.drawFastHLine(123, 9, 5, WHITE); // right side Max value auxiliary mark
oled.drawFastHLine(123, 63, 5, WHITE);
for (int x = 26; x <= 128; x += 5) {
oled.drawFastHLine(x, 36, 2, WHITE); // Draw the center line (horizontal line) with a dotted line
}
for (int x = (127 - 25); x > 30; x -= 25) {
for (int y = 10; y < 63; y += 5) {
oled.drawFastVLine(x, y, 2, WHITE); // Draw 3 vertical lines with dotted lines
}
}
}
void readWave() { // 波形の読み取り Record waveform to memory array
if (att10x == 1) { // if 1/10 attenuator required
pullGND(R_12k);
} else { // if not required
hiZ(R_12k);
}
switchPushed = false; // Clear switch operation flag
switch (hRange) { // set recording conditions in accordance with the range number
case 0: // 200ms range
timeExec = 1600 + 60; // Approximate execution time(ms) Used for countdown until saving to EEPROM
ADCSRA = ADCSRA & 0xf8; // clear bottom 3bit
ADCSRA = ADCSRA | 0x07; // dividing ratio = 128 (default of Arduino)
for (int i = 0; i < REC_LENG; i++) { // up to rec buffer size
waveBuff[i] = analogRead(0); // read and save approx 112us
delayMicroseconds(7888); // timing adjustment
if (switchPushed == true) { // if any switch touched
switchPushed = false;
break; // abandon record(this improve response)
}
}
break;
case 1: // 100ms range
timeExec = 800 + 60; // Approximate execution time(ms) Used for countdown until saving to EEPROM
ADCSRA = ADCSRA & 0xf8; // clear bottom 3bit
ADCSRA = ADCSRA | 0x07; // dividing ratio = 128 (default of Arduino)
for (int i = 0; i < REC_LENG; i++) { // up to rec buffer size
waveBuff[i] = analogRead(0); // read and save approx 112us
delayMicroseconds(3860); // timing adjustmet tuned
if (switchPushed == true) { // if any switch touched
switchPushed = false;
break; // abandon record(this improve response)
}
}
break;
case 2: // 50ms range
timeExec = 400 + 60; // Approximate execution time(ms)
ADCSRA = ADCSRA & 0xf8; // clear bottom 3bit
ADCSRA = ADCSRA | 0x07; // dividing ratio = 128 (default of Arduino)
for (int i = 0; i < REC_LENG; i++) { // up to rec buffer size
waveBuff[i] = analogRead(0); // read and save approx 112us
delayMicroseconds(1880); // timing adjustmet tuned
if (switchPushed == true) { // if any switch touched
break; // abandon record(this improve response)
}
}
break;
case 3: // 20ms range
timeExec = 160 + 60; // Approximate execution time(ms)
ADCSRA = ADCSRA & 0xf8; // clear bottom 3bit
ADCSRA = ADCSRA | 0x07; // dividing ratio = 128 (default of Arduino)
for (int i = 0; i < REC_LENG; i++) { // up to rec buffer size
waveBuff[i] = analogRead(0); // read and save approx 112us
delayMicroseconds(686); // timing adjustmet tuned
if (switchPushed == true) { // if any switch touched
break; // abandon record(this improve response)
}
}
break;
case 4: // 10ms range
timeExec = 80 + 60; // Approximate execution time(ms)
ADCSRA = ADCSRA & 0xf8; // clear bottom 3bit
ADCSRA = ADCSRA | 0x07; // dividing ratio = 128 (default of Arduino)
for (int i = 0; i < REC_LENG; i++) { // up to rec buffer size
waveBuff[i] = analogRead(0); // read and save approx 112us
delayMicroseconds(287); // timing adjustmet tuned
if (switchPushed == true) { // if any switch touched
break; // abandon record(this improve response)
}
}
break;
case 5: // 5ms range
timeExec = 40 + 60; // Approximate execution time(ms)
ADCSRA = ADCSRA & 0xf8; // clear bottom 3bit
ADCSRA = ADCSRA | 0x07; // dividing ratio = 128 (default of Arduino)
for (int i = 0; i < REC_LENG; i++) { // up to rec buffer size
waveBuff[i] = analogRead(0); // read and save approx 112μs
delayMicroseconds(87); // timing adjustmet tuned
if (switchPushed == true) { // if any switch touched
break; // abandon record(this improve response)
}
}
break;
case 6: // 2ms range
timeExec = 16 + 60; // Approximate execution time(ms)
ADCSRA = ADCSRA & 0xf8; // clear bottom 3bit
ADCSRA = ADCSRA | 0x06; // dividing ratio = 64 (0x1=2, 0x2=4, 0x3=8, 0x4=16, 0x5=32, 0x6=64, 0x7=128)
for (int i = 0; i < REC_LENG; i++) { // up to rec buffer size
waveBuff[i] = analogRead(0); // read and save approx 56us
delayMicroseconds(23); // timing adjustmet tuned
}
break;
case 7: // 1ms range
timeExec = 8 + 60; // Approximate execution time(ms)
ADCSRA = ADCSRA & 0xf8; // clear bottom 3bit
ADCSRA = ADCSRA | 0x05; // dividing ratio = 16 (0x1=2, 0x2=4, 0x3=8, 0x4=16, 0x5=32, 0x6=64, 0x7=128)
for (int i = 0; i < REC_LENG; i++) { // up to rec buffer size
waveBuff[i] = analogRead(0); // read and save approx 28us
delayMicroseconds(10); // timing adjustmet tuned
}
break;
case 8: // 500us range
timeExec = 4 + 60; // Approximate execution time(ms)
ADCSRA = ADCSRA & 0xf8; // clear bottom 3bit
ADCSRA = ADCSRA | 0x04; // dividing ratio = 16(0x1=2, 0x2=4, 0x3=8, 0x4=16, 0x5=32, 0x6=64, 0x7=128)
for (int i = 0; i < REC_LENG; i++) { // up to rec buffer size
waveBuff[i] = analogRead(0); // read and save approx 16us
delayMicroseconds(4); // timing adjustmet
// time fine adjustment 0.0625 x 8 = 0.5us(nop=0.0625us @16MHz)
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
}
break;
case 9:
case 10:
case 11: // 共通 common 200, 100, 50us range
timeExec = 2 + 60; // Approximate execution time(ms)
ADCSRA = ADCSRA & 0xf8; // clear bottom 3bit
ADCSRA = ADCSRA | 0x02; // dividing ratio = 4(0x1=2, 0x2=4, 0x3=8, 0x4=16, 0x5=32, 0x6=64, 0x7=128)
for (int i = 0; i < REC_LENG; i++) { // up to rec buffer size
waveBuff[i] = analogRead(0); // read and save approx 6us
// time fine adjustment 0.0625 * 20 = 1.25us (nop=0.0625us @16MHz)
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
}
break;
}
}
void dataAnalize() { // 波形の分析 get various information from wave form
long d;
long sum = 0;
// search max and min value
dataMin = 1023; // min value initialize to big number
dataMax = 0; // max value initialize to small number
for (int i = 0; i < REC_LENG; i++) { // serach max min value
d = waveBuff[i];
sum = sum + d;
if (d < dataMin) { // update min
dataMin = d;
}
if (d > dataMax) { // updata max
dataMax = d;
}
}
// calculate average
dataAve = (sum + 10) / 20; // Average value calculation (calculated by 10 times to improve accuracy)
// 実効値の計算 rms value calc.
sum = 0;
for (int i = 0; i < REC_LENG; i++) { // バッファ全体に対し to all buffer
d = waveBuff[i] - (dataAve + 5) / 10; // オーバーフロー防止のため生の値で計算(10倍しない)
sum += d * d; // 二乗和を積分
}
dataRms = sqrt(sum / REC_LENG); // 実効値の10倍の値 get rms value
// Trigger position search
for (trigP = ((REC_LENG / 2) - 51); trigP < ((REC_LENG / 2) + 50); trigP++) { // Find the points that straddle the median at the center ± 50 of the data range
if (trigD == 0) { // if trigger direction is positive
if ((waveBuff[trigP - 1] < (dataMax + dataMin) / 2) && (waveBuff[trigP] >= (dataMax + dataMin) / 2)) {
break; // positive trigger position found !
}
} else { // trigger direction is negative
if ((waveBuff[trigP - 1] > (dataMax + dataMin) / 2) && (waveBuff[trigP] <= (dataMax + dataMin) / 2)) {
break;
} // negative trigger poshition found !
}
}
trigSync = true;
if (trigP >= ((REC_LENG / 2) + 50)) { // If the trigger is not found in range
trigP = (REC_LENG / 2); // Set it to the center for the time being
trigSync = false; // set Unsync display flag
}
if ((dataMax - dataMin) <= MIN_TRIG_SWING) { // amplitude of the waveform smaller than the specified value
trigSync = false; // set Unsync display flag
}
freqDuty();
}
void freqDuty() { // 周波数とデューティ比を求める detect frequency and duty cycle value from waveform data
int swingCenter; // center of wave (half of p-p)
float p0 = 0; // 1-st posi edge
float p1 = 0; // total length of cycles
float p2 = 0; // total length of pulse high time
float pFine = 0; // fine position (0-1.0)
float lastPosiEdge; // last positive edge position
float pPeriod; // pulse period
float pWidth; // pulse width
int p1Count = 0; // wave cycle count
int p2Count = 0; // High time count
boolean a0Detected = false;
// boolean b0Detected = false;
boolean posiSerch = true; // true when serching posi edge
swingCenter = (3 * (dataMin + dataMax)) / 2; // calculate wave center value
for (int i = 1; i < REC_LENG - 2; i++) { // scan all over the buffer
if (posiSerch == true) { // posi slope (frequency serch)
if ((sum3(i) <= swingCenter) && (sum3(i + 1) > swingCenter)) { // if across the center when rising (+-3data used to eliminate noize)
pFine = (float)(swingCenter - sum3(i)) / ((swingCenter - sum3(i)) + (sum3(i + 1) - swingCenter) ); // fine cross point calc.
if (a0Detected == false) { // if 1-st cross
a0Detected = true; // set find flag
p0 = i + pFine; // save this position as startposition
} else {
p1 = i + pFine - p0; // record length (length of n*cycle time)
p1Count++;
}
lastPosiEdge = i + pFine; // record location for Pw calcration
posiSerch = false;
}
} else { // nega slope serch (duration serch)
if ((sum3(i) >= swingCenter) && (sum3(i + 1) < swingCenter)) { // if across the center when falling (+-3data used to eliminate noize)
pFine = (float)(sum3(i) - swingCenter) / ((sum3(i) - swingCenter) + (swingCenter - sum3(i + 1)) );
if (a0Detected == true) {
p2 = p2 + (i + pFine - lastPosiEdge); // calucurate pulse width and accumurate it
p2Count++;
}
posiSerch = true;
}
}
}
pPeriod = p1 / p1Count; // pulse period
pWidth = p2 / p2Count; // palse width
waveFreq = 1.0 / ((pgm_read_float(hRangeValue + hRange) * pPeriod) / 25.0); // frequency
waveDuty = 100.0 * pWidth / pPeriod; // duty ratio
}
int sum3(int k) { // Sum of before and after and own value
int m = waveBuff[k - 1] + waveBuff[k] + waveBuff[k + 1];
return m;
}
void drawBitmap(const unsigned char *bitmap) {
oled.clearDisplay();
oled.drawBitmap(0, 0, bitmap, 128, 64, 1); // 128x64 - размер дисплея
oled.display();
delay(1500);
oled.clearDisplay();
}
void dispHold() { // display "Hold"
oled.fillRect(42, 11, 24, 8, BLACK); // black paint 4 characters
oled.setCursor(42, 11);
oled.print(F("Hold")); // Hold
oled.display(); //
}
void dispInf() { // 各種情報の表示 Display of various information
float volt;
// DC/ACカップル表示 display DC/AC couple mode
oled.setCursor(0, 0);
if (inMode == 0) {
oled.print(F("DC"));
} else {
oled.print(F("AC"));
}
// 垂直感度表示 vertical sensitivity
oled.setCursor(15, 0); // around top left
oled.print(vScale); // vertical sensitivity value
if (scopeP == 0) { // if scoped
oled.drawFastHLine(13, 7, 27, WHITE); // display scoped mark at the bottom
oled.drawFastVLine(13, 5, 2, WHITE);
oled.drawFastVLine(39, 5, 2, WHITE);
}
// 水平速度表示 horizontal sweep speed
oled.setCursor(42, 0); //
oled.print(hScale); // display sweep speed (time/div)
if (scopeP == 1) { // if scoped
oled.drawFastHLine(40, 7, 33, WHITE); // display scoped mark
oled.drawFastVLine(40, 5, 2, WHITE);
oled.drawFastVLine(72, 5, 2, WHITE);
}
// トリガー極性表示 trigger polarity
oled.setCursor(75, 0); // at top center
if (trigD == 0) { // if positive
oled.print(char(0x18)); // up mark
} else {
oled.print(char(0x19)); // down mark ↓
}
if (scopeP == 2) { // if scoped
oled.drawFastHLine(72, 7, 11, WHITE); // display scoped mark
oled.drawFastVLine(72, 5, 2, WHITE);
oled.drawFastVLine(82, 5, 2, WHITE);
}
// 電圧測定結果表示 average voltage
if (inMode == 0) { // DCモードなら if DC mode
oled.setCursor(86, 0);
oled.print(F("av")); // av : average
if (att10x == 1) { // if 10x attenuator is used
volt = dataAve * lsb50V / 10.0; // 平均電圧50V(10倍値なので補正) range value
} else { // no!
volt = dataAve * lsb5V / 10.0; // 5V (10倍値なので補正)range value
}
if (volt < 10.0) { // if less than 10V
dtostrf(volt, 4, 2, chrBuff); // format x.xx
} else { // no! over 10
dtostrf(volt, 4, 1, chrBuff); // format xx.x
}
} else { // AC モードなら AC mode
oled.setCursor(86, 0);
oled.print(F("rm")); // rm : rms root mean square
if (att10x == 1) { // if 10x attenuator is used
volt = dataRms * lsb50Vac; // 実効値 50V range value
} else { // no!
volt = dataRms * lsb5Vac; // 5V range value
}
if (volt < 10.0) { // if less than 10V
dtostrf(volt, 4, 2, chrBuff); // format x.xx
} else { // no!
dtostrf(volt, 4, 1, chrBuff); // format xx.x
}
}
oled.setCursor(98, 0); // at top right
oled.print(chrBuff); // 電圧の値を表示 display voltage
oled.print(F("V"));
// 波形の左に垂直電圧目盛り表示 vartical scale lines
volt = rangeMaxDisp / 100.0; // convert Max voltage
if (vRange <= 3) { // 20Vレンジかそれ以上なら if range is 20 or more
dtostrf(volt, 4, 0, chrBuff); // format **
} else {
if (vRange <= 7) {
dtostrf(volt, 4, 1, chrBuff); // format **.*
} else {
dtostrf(volt, 4, 2, chrBuff); // format *.**
}
}
oled.setCursor(0, 9);
oled.print(chrBuff); // 上限値 display Max value
volt = (rangeMaxDisp + rangeMinDisp) / 200.0; // center value calculation
if (vRange <= 3) { // 20Vレンジかそれ以上なら
dtostrf(volt, 4, 0, chrBuff); // format ** 20
} else {
if (vRange <= 7) {
dtostrf(volt, 4, 1, chrBuff); // format **.*
} else {
dtostrf(volt, 4, 2, chrBuff); // format *.**
}
}
oled.setCursor(0, 33);
oled.print(chrBuff); // 中央値 display the value
volt = rangeMinDisp / 100.0; // 波形下限値 convart Min voltage
if (vRange <= 3) { // 20Vレンジかそれ以上なら
dtostrf(volt, 4, 0, chrBuff); // format ** 20
} else {
if (vRange <= 7) {
dtostrf(volt, 4, 1, chrBuff); // format **.*
} else {
dtostrf(volt, 4, 2, chrBuff); // format *.**
if (inMode >= 1 ) { // 0.5 0.2V なら圧縮表示 compress zero(-0.25 -> -.25)
chrBuff[1] = chrBuff[2]; // 符号より右の文字列を左シフト(先頭のゼロを消して文字数削減)
chrBuff[2] = chrBuff[3];
chrBuff[3] = chrBuff[4];
chrBuff[4] = chrBuff[5];
}
}
}
oled.setCursor(0, 57);
oled.print(chrBuff); // 下限値 display the value
// 周波数とデューティ比の表示 display frequency, duty % or trigger missed
if (trigSync == false) { // If trigger point can't found
oled.fillRect(92, 14, 24, 8, BLACK); // black paint 4 character
oled.setCursor(92, 14); //
oled.print(F("unSync")); // dosplay Unsync
} else {
oled.fillRect(91, 12, 25, 9, BLACK); // erase Freq area
oled.setCursor(92, 13); // set display locatio
if (waveFreq < 99.9) { // if less than 99.9Hz
oled.print(waveFreq, 1); // display 99.9Hz
oled.print(F("Hz"));
} else if (waveFreq < 999.9) { // if less than 999.9Hz
oled.print(waveFreq, 0); // display 999Hz
oled.print(F("Hz"));
} else if (waveFreq < 9999.9) { // if less than 9.9999kHz
oled.print((waveFreq / 1000.0), 2); // display 9.99kH
oled.print(F("kH"));
} else { // if more
oled.print((waveFreq / 1000.0), 1); // display 99.9kH
oled.print(F("kH"));
}
oled.fillRect(97, 21, 25, 10, BLACK); // erase Freq area (as small as possible)
oled.setCursor(98, 23); // set location
oled.print(waveDuty, 1); // display duty (High level ratio) in %
oled.print(F("%"));
}
// デバッグ用 this for debug (value display on screen)
// oled.fillRect(40, 12, 25, 9, BLACK); // 波形領域の左上に、値の表示用に黒塗り
// oled.setCursor(40, 13); //
// oled.print(hRange); // 値を表示
}
void plotData() { // 波形の画面へのプロット plot waveform on OLED
long y1, y2;
if (hRange <= 9) { // 通常表示 noromal plot
for (int x = 0; x <= 98; x++) {
y1 = map(waveBuff[x + trigP - 50], rangeMin, rangeMax, 63, 9); // convert to plot address
y1 = constrain(y1, 9, 63); // Crush(Saturate) the protruding part
y2 = map(waveBuff[x + trigP - 49], rangeMin, rangeMax, 63, 9); // to address calucurate
y2 = constrain(y2, 9, 63); //
oled.drawLine(x + 27, y1, x + 28, y2, WHITE); // connect between point
}
} else if (hRange == 10) { // 100usレンジなら2倍拡大表示 zoom 2X when 100us range
for (int x = 0; x <= 49; x++) {
y1 = map(waveBuff[x + trigP - 25], rangeMin, rangeMax, 63, 9); // convert to plot address
y1 = constrain(y1, 9, 63); // Crush(Saturate) the protruding part
y2 = map(waveBuff[x + trigP - 24], rangeMin, rangeMax, 63, 9); // to address calucurate
y2 = constrain(y2, 9, 63); //
oled.drawLine(x * 2 + 27, y1, x * 2 + 29, y2, WHITE); // connect between point
}
} else if (hRange == 11) { // 50usレンジなら4倍拡大表示 zoom 4x when 50us range
for (int x = 0; x <= 24; x++) {
y1 = map(waveBuff[x + trigP - 13], rangeMin, rangeMax, 63, 9); // convert to plot address
y1 = constrain(y1, 9, 63); // Crush(Saturate) the protruding part
y2 = map(waveBuff[x + trigP - 12], rangeMin, rangeMax, 63, 9); // to address calucurate
y2 = constrain(y2, 9, 63); //
oled.drawLine(x * 4 + 27, y1, x * 4 + 31, y2, WHITE); // connect between point
}
}
}
void saveEEPROM() { // Save the setting value in EEPROM after waiting a while after the button operation.
if (saveTimer > 0) { // If the timer value is positive,
saveTimer = saveTimer - timeExec; // Timer subtraction
if (saveTimer < 0) { // if time up
EEPROM.write(0, vRange); // save current status to EEPROM
EEPROM.write(1, hRange);
EEPROM.write(2, trigD);
EEPROM.write(3, scopeP);
EEPROM.write(4, offset5Vac >> 8); // AC測定5Vレンジのオフセット値の上位(ビッグエンディアンで記録)
EEPROM.write(5, offset5Vac & 0xFF); // 下位
EEPROM.write(6, offset50Vac >> 8); // 50V 上位
EEPROM.write(7, offset50Vac & 0xFF); // 下位
}
}
}
void loadEEPROM() { // Read setting values from EEPROM (abnormal values will be corrected to default)
int x;
x = EEPROM.read(0); // vRange
if ((x < 0) || (x > 9)) { // if out side 0-9
x = 3; // default value
}
vRange = x;
x = EEPROM.read(1); // hRange
if ((x < 0) || (x > 11)) { // if out of 0-11
x = 3; // default value
}
hRange = x;
x = EEPROM.read(2); // trigD
if ((x < 0) || (x > 1)) { // if out of 0-1
x = 1; // default value
}
trigD = x;
x = EEPROM.read(3); // scopeP
if ((x < 0) || (x > 2)) { // if out of 0-2
x = 1; // default value
}
scopeP = x;
x = EEPROM.read(4); // AC 5Vレンジのオフセット値 offset value of AC5V
x = x << 8 ;
x = x | EEPROM.read(5);
if ((x < 350) || (x > 650 )) { // 異常値だったら(350-650の範囲外)if abnormal value,
x = 594; // 理論値をセット default value
}
offset5Vac = x;
x = EEPROM.read(6); //AC 50Vレンジのオフセット値 offset value of AC50V
x = x << 8 ;
x = x | EEPROM.read(7);
if ((x < 350) || (x > 650 )) { // 異常値だったら(350-650の範囲外) if abnormal value,
x = 546; // 理論値をセット default value
}
offset50Vac = x;
}
void auxFunctions() { // 補助機能を起動 select AUX function
if (digitalRead(8) == LOW) { // セレクトボタンが押されていたらバッテリー電圧測定 if SELECT button pushed, measure battery voltage
battVolt();
}
if (digitalRead(10) == LOW) { // DOWN ボタンなら DMM50Vレンジ
dmm5V();
}
if (digitalRead(9) == LOW) { // UPボタンなら DMM5Vレンジ
dmm50V();
}
}
void battVolt() { // バッテリー電圧測定 Battery voltage measure (this for pen osillo)
float volt;
long x;
analogReference(DEFAULT); // ADC full scale set to Vcc
while (1) { // do forever
x = 0;
for (int i = 0; i < 100; i++) { // 100 times
x = x + analogRead(1); // A1ピンの電圧測定read A1 pin voltage and accumulate
}
volt = (x / 100.0) * 5.0 / 1023.0; // convert voltage value
oled.clearDisplay(); // all erase screen(0.4ms)
oled.setTextColor(WHITE); // write in white character
oled.setCursor(20, 16); //
oled.setTextSize(1); // standerd size character
oled.println(F("Battery voltage"));
oled.setCursor(35, 30); //
oled.setTextSize(2); // double size character
dtostrf(volt, 4, 2, chrBuff); // display batterry voltage x.xxV
oled.print(chrBuff);
oled.println(F("V"));
oled.display();
delay(150);
}
}
void dmm5V() { // 電圧計 5V モード digital voltmeter 5V range
float volt, vPP;
analogReference(INTERNAL);
while (1) { // 無限ループで、
digitalWrite(13, HIGH); // flash LED
oled.clearDisplay(); // erase screen (0.4ms)
oled.setTextColor(WHITE); // write in white character
oled.setCursor(0, 0); //
oled.setTextSize(1); // by standerd size character
if (digitalRead(7) == HIGH) { // DC モードだったら if awitch is DC mode
hiZ(R_820k); // 測定条件設定 set measure condition
hiZ(R_82k);
hiZ(R_12k); //
volt = analogRead(0) * lsb5V; // DC電圧測定 measure voltage
oled.println(F("DC DVM 5V range")); //
oled.setCursor(20, 22); //
oled.setTextSize(2); // double size character
dtostrf(volt, 4, 2, chrBuff); // display voltage x.xxV
oled.print(chrBuff);
oled.print(F("V"));
} else { // AC モード AC mode
pull5V(R_820k); // give offset
hiZ(R_82k);
hiZ(R_12k); // Set the attenuator control pin to Hi-z (use as input)
ADCSRA = ADCSRA & 0xf8; // clear bottom 3bit
ADCSRA = ADCSRA | 0x07; // dividing ratio = 128 (default of Arduino)
for (int i = 0; i < REC_LENG; i++) { // 5msレンジでバッファに波形を記録 recoord to buffer at 5ms range settings
waveBuff[i] = analogRead(0); // read and save approx 112μs
delayMicroseconds(87); // timing adjustmet tuned
}
dataAnalize(); // 波形を解析 analize data
volt = dataRms * lsb5Vac; // 実効値を計算 get RMS value
vPP = (dataMax - dataMin) * lsb5Vac; // P-P値を計算 get Peak to peak voltage
oled.println(F("AC DVM 5V range"));
oled.setTextSize(2); // double size character
dtostrf(volt, 4, 2, chrBuff); // foromat x.xx
oled.setCursor(20, 16); //
oled.print(chrBuff); // 実効値を表示 display rms voltage
oled.println(F("Vrms"));
dtostrf(vPP, 4, 2, chrBuff); // format x.xx
oled.setCursor(20, 38); //
oled.print(chrBuff); // P-P電圧を表示
oled.println(F("Vpp"));
}
oled.display(); // 実際に表示 actual display here
digitalWrite(13, LOW); // stop LED flash
delay(150); // wait next measure
}
}
void dmm50V() { // 電圧計 5V モード digital voltmeter 5V range
float volt, vPP;
analogReference(INTERNAL);
while (1) { // 無限ループで、forever,
digitalWrite(13, HIGH); // flash LED
oled.clearDisplay(); // erase screen (0.4ms)
oled.setTextColor(WHITE); // write in white character
oled.setCursor(0, 0); //
oled.setTextSize(1); // by standerd size character
if (digitalRead(7) == HIGH) { // DC モードだったら if awitch is DC mode
hiZ(R_820k); // 測定条件設定 set measure condition
hiZ(R_82k);
pullGND(R_12k); //
volt = analogRead(0) * lsb50V; // DC電圧測定 measure voltage
oled.println(F("DC DVM 50V range")); //
oled.setCursor(20, 22); //
oled.setTextSize(2); // double size character
dtostrf(volt, 4, 1, chrBuff); // display voltage xx.xV
oled.print(chrBuff);
oled.print(F("V"));
} else { // AC モード AC mode
hiZ(R_820k); // 測定条件設定 set measure condition
pull5V(R_82k); // pull up
pullGND(R_12k); // att 10x
ADCSRA = ADCSRA & 0xf8; // clear bottom 3bit
ADCSRA = ADCSRA | 0x07; // dividing ratio = 128 (default of Arduino)
for (int i = 0; i < REC_LENG; i++) { // 5msレンジでバッファに波形を記録 recoord to buffer at 5ms range settings
waveBuff[i] = analogRead(0); // read and save approx 112μs
delayMicroseconds(87); // timing adjustmet tuned
}
dataAnalize(); // 波形を解析 analize data
volt = dataRms * lsb50Vac; // 実効値を計算 get RMS value
vPP = (dataMax - dataMin) * lsb50Vac; // P-P値を計算 get Peak to peak voltage
oled.println(F("AC DVM 50V range"));
oled.setTextSize(2); // double size character
dtostrf(volt, 4, 1, chrBuff); // foromat xx.x
oled.setCursor(20, 16); //
oled.print(chrBuff); // 実効値を表示 display rms voltage
oled.println(F("Vrms"));
dtostrf(vPP, 4, 1, chrBuff); // format xx.x
oled.setCursor(20, 38); //
oled.print(chrBuff); // P-P電圧を表示
oled.println(F("Vpp"));
}
oled.display(); // 実際に表示 actual display here
digitalWrite(13, LOW); // stop LED flash
delay(150); // wait next measure
}
}
void uuPinOutputLow(unsigned int d, unsigned int a) { // 指定ピンをLOW出力に設定 output LOW at specfied pin
// PORTx =0, DDRx=1
// example uuPinOutputLow(0b00000001111000, 0b000000); D3-6 output Low
unsigned int x;
x = d & 0x00FF; PORTD &= ~x; DDRD |= x;
x = d >> 8; PORTB &= ~x; DDRB |= x;
x = a & 0x003F; PORTC &= ~x; DDRC |= x;
}
void pin2IRQ() { // 操作スイッチを割り込みで読む Pin2(int.0) interrupr handler
// Pin8,9,10,11 buttons are bundled with diodes and connected to Pin2.
// So, if any button is pressed, this routine will start.
int x; // Port information holding variable
x = PINB; // copy port B status
if ( (x & 0x07) != 0x07) { // if bottom 3bit is not all Hi(any wer pressed)
saveTimer = 5000; // set EEPROM save timer to 5 secnd
switchPushed = true; // switch pushed falag ON
}
if ((x & 0x01) == 0) { // if select button(Pin8) pushed,
scopeP++; // forward scope position
if (scopeP > 2) { // if upper limit
scopeP = 0; // move to start position
}
}
if ((x & 0x04) == 0) { // if UP button(Pin9) pusshed, and
if (scopeP == 0) { // scoped vertical range
vRange++; // V-range up !
if (vRange > 9) { // if upper limit
vRange = 9; // stay as is
}
}
if (scopeP == 1) { // if scoped hrizontal range
hRange++; // H-range up !
if (hRange > 11) { // if upper limit
hRange = 11; // stay as is
}
}
if (scopeP == 2) { // if scoped trigger porality
trigD = 0; // set trigger porality to +
}
}
if ((x & 0x02) == 0) { // if DOWN button(Pin10) pusshed, and
if (scopeP == 0) { // scoped vertical range
vRange--; // V-range DOWN
if (vRange < 2) { // if bottom (レンジ番号0,1は欠番 以前はAuto5V Auto50V)
vRange = 2; // stay as is
}
}
if (scopeP == 1) { // if scoped hrizontal range
hRange--; // H-range DOWN
if (hRange < 0) { // if bottom
hRange = 0; // satay as is
}
}
if (scopeP == 2) { // if scoped trigger porality
trigD = 1; // set trigger porality to -
}
}
if ((x & 0x08) == 0) { // if HOLD button(pin11) pushed
hold = ! hold; // revers the flag
}
}
