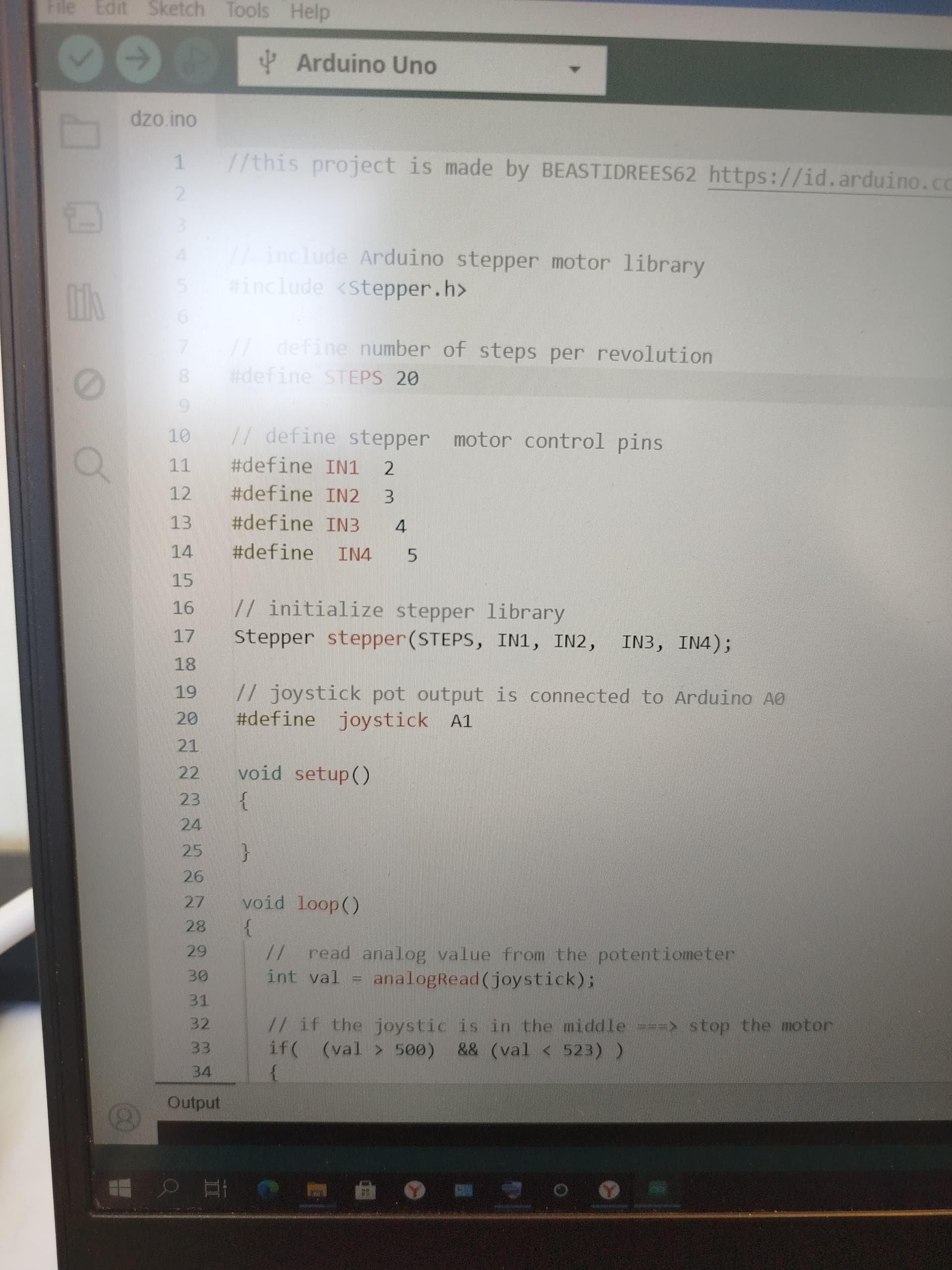
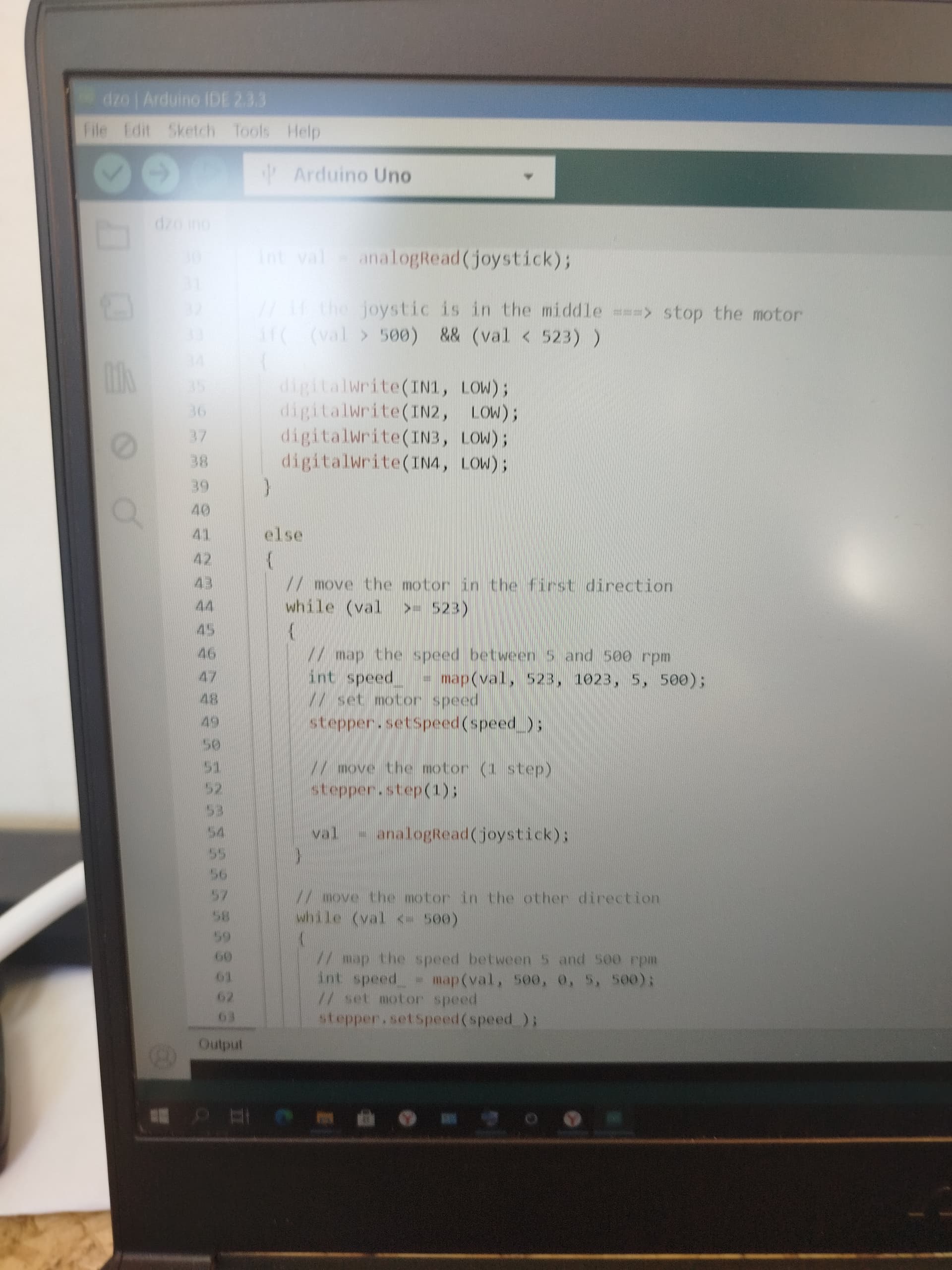
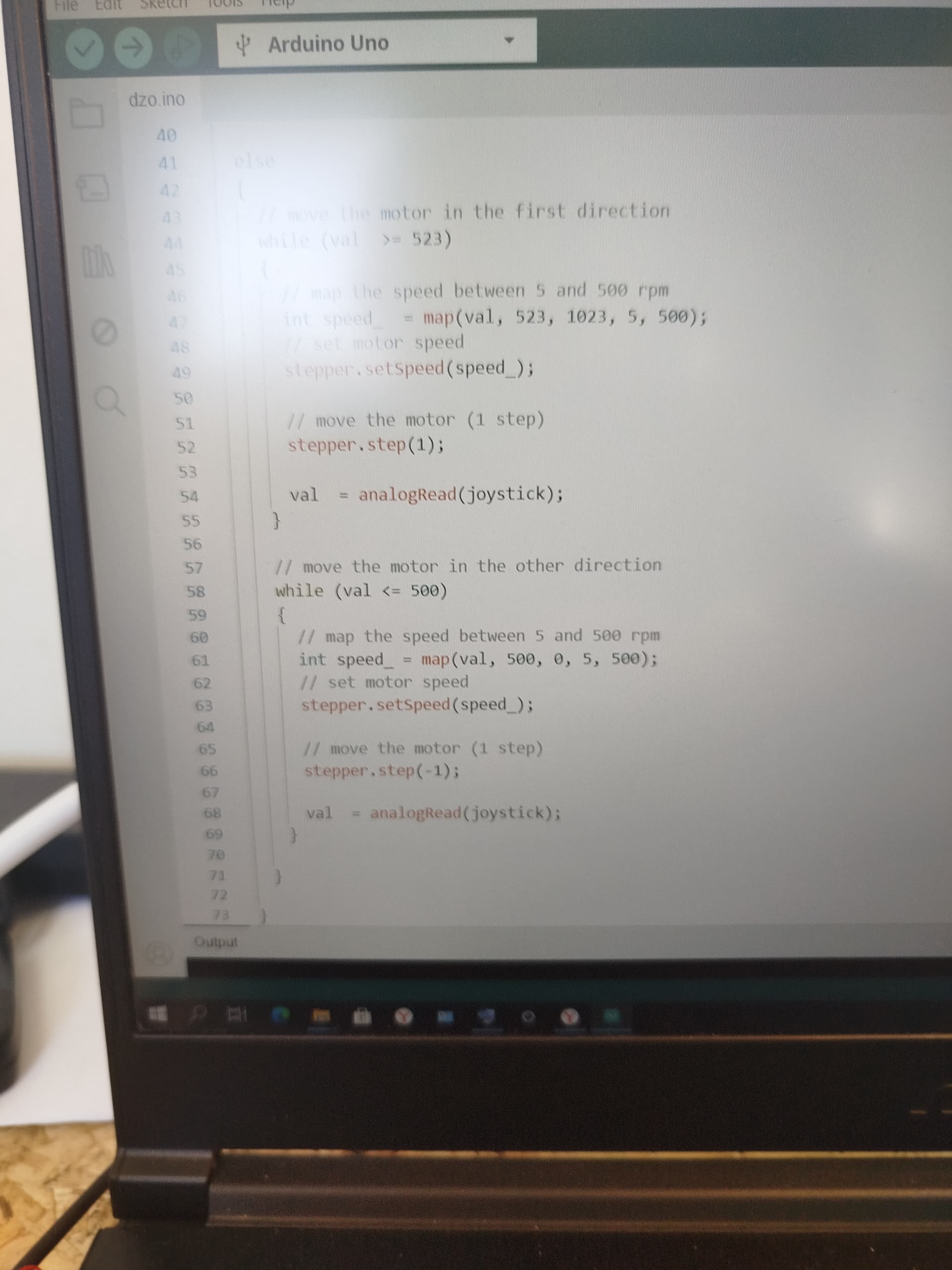
Помогите пожалуйста, хочу сделать ШД Nemo17 на управление джойстиком, нашел скетч в интернете, загрузил, повороты от джойстика работают, но сам ШД производит самовольную работу, когда стоит в застое, то есть не подаю сигнал джойстика, а шаговый двигатель произвольно крутится в разные стороны и высокое потребление тока, но как я начинаю с помощью джойстика управлять им, то сразу все нормально становится, поваричивает в нужную сторону и потребление тока нормальное
// the setup function runs once when you press reset or power the board
void setup() {
// initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
}
// the loop function runs over and over again forever
void loop() {
digitalWrite(LED_BUILTIN, HIGH); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(LED_BUILTIN, LOW); // turn the LED off by making the voltage LOW
delay(1000); // wait for a second
}
Правила форума почитайте, прежде чем постить. Код выкладывается ТЕКСТОМ, с использованием тегов кода, а не картинками, где надо ломать глаза, пытаясь что-то разглядеть.
Скриншоты с кодом - неуважение к участникам, поэтому и реакция такая.
думаю сигнал с джойстика моросит и выпадает из твоего зазора нечувствительности 500 - 523
Написать простой скетч с выводом значений с джойстика в монитор порта, для начала