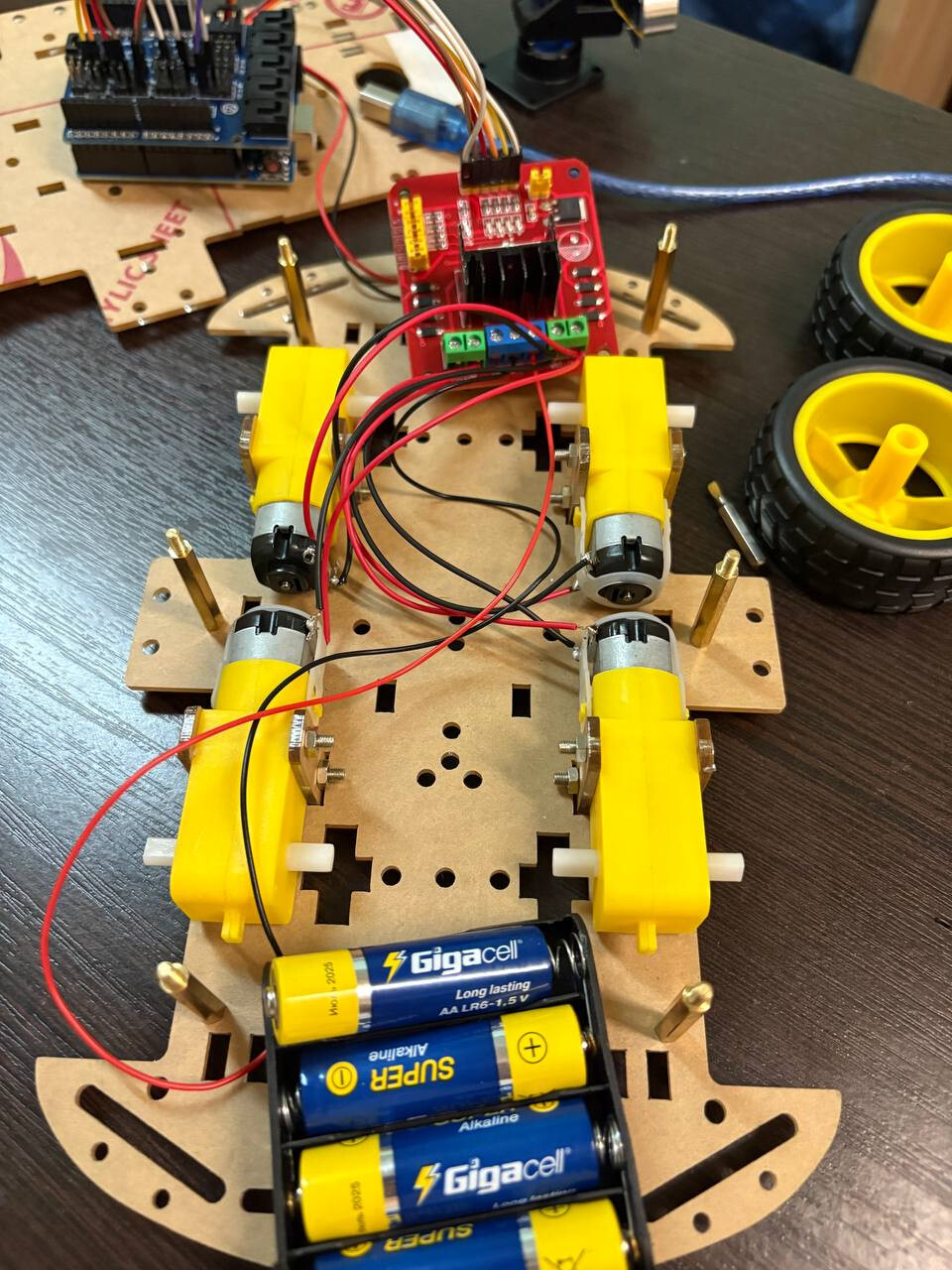
Здравствуйте может кто помочь разобраться с проблемой. В общем суть проблемы такова: я подключал к этому драйверу 4 мотора написал код что бы моторчики крутились сначала по очереди потом все вместе и так же в обратную сторону, но такая проблема колеса крутятся вперед по отдельности но вместе не хотят и крутится только одна сторона, в обратную сторону моторчики вообще не крутятся никак. Питаю от 4 пальчиковых батареек
Код:
#define pinA1 2 // Левый мотор
#define pinA2 3
#define pinB1 4 // Правый мотор
#define pinB2 5
#define enableA 9
#define enableB 11
void setup() {
pinMode(pinA1, OUTPUT);
pinMode(pinA2, OUTPUT);
pinMode(pinB1, OUTPUT);
pinMode(pinB2, OUTPUT);
pinMode(enableA, OUTPUT);
pinMode(enableB, OUTPUT);
Serial.begin(9600);
Serial.println(“Тест моторов начнётся через 3 секунды…”);
delay(3000);
}
void loop() {
Serial.println(“Вместе”);
motorAon();
motorBon();
motorAforward();
motorBforward();
delay(1000);
motorBcoast();
motorAcoast();
delay(1000);
Serial.println(“Левый”);
motorAforward();
delay(2000);
motorAstop();
}
void motorAforward() {
digitalWrite (pinA1, HIGH);
digitalWrite (pinA2, LOW);
}
void motorBforward() {
digitalWrite (pinB1, LOW);
digitalWrite (pinB2, HIGH);
}
void motorAbackward() {
digitalWrite (pinA1, LOW);
digitalWrite (pinA2, HIGH);
}
void motorBbackward() {
digitalWrite (pinB1, HIGH);
digitalWrite (pinB2, LOW);
}
void motorAstop() {
digitalWrite (pinA1, HIGH);
digitalWrite (pinA2, HIGH);
}
void motorBstop() {
digitalWrite (pinB1, HIGH);
digitalWrite (pinB2, HIGH);
}
void motorAcoast() {
digitalWrite (pinA1, LOW);
digitalWrite (pinA2, LOW);
}
void motorBcoast() {
digitalWrite (pinB1, LOW);
digitalWrite (pinB2, LOW);
}
void motorAon() {
digitalWrite (enableA, HIGH);
}
void motorBon() {
digitalWrite (enableB, HIGH);
}
void motorAoff() {
digitalWrite (enableA, LOW);
}
void motorBoff() {
digitalWrite (enableB, LOW);
}