У Elinchrom в середине 2000-х была серия вспышек серии RX: Style RX 300/600/1200, Ranger RX, Digital RX 1200/2400. Для управления у них есть разъем Remote или RT. Изначально управление было проводным через специальное устройство USB Multilink 19345 и ПО ERS System 19339 (если у кого-то осталось — напишите в личку). Также к разъему подключался проводной пульт RX Hand Remote 19340. Позже появились беспроводные адаптеры EL-Skyport transceiver RX 19353 и трансмиттеры EL-Skyport для камеры. Трансмиттер позволяет синхронизировать камеру со вспышкой при съемке, а также управлять мощностью, включать/выключать пилотный свет. Беспроводные адаптеры EL-Skyport transceiver RX 19353 достаточно редки и дороги, поэтому было решено создать свой на базе Arduino.
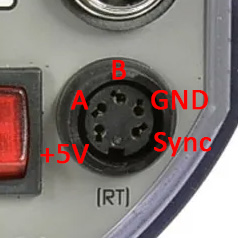
Сам разъем устроен просто. У него 5 контактов: общий, + 5В, синхронизация вспышки и два контакта A и B для обмена данными по RS-485.
Подробности протокола я описываю в ветке форума impulsite: https://impulsite.ru/viewtopic.php?f=39&t=2263
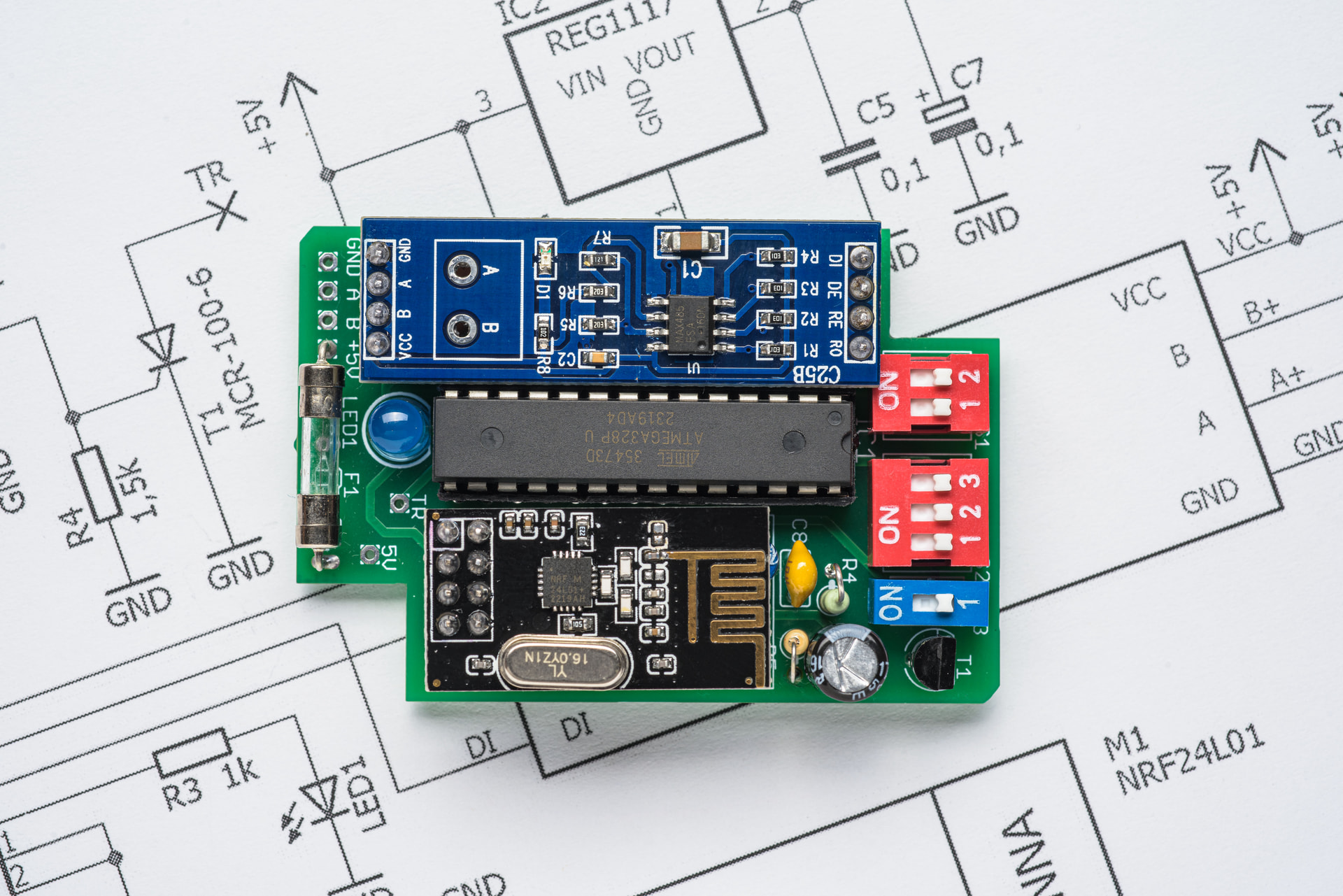
В основе устройства лежит Arduino Uno с контроллером Atmega328p но с минимальной обвязкой, чтобы устройство было компактным и удобным в использовании. Контроллер я программирую на плате Arduino Uno, а затем переставляю в свое устройство. Также использованы модули NRF24L01+ и RS485. Трансмиттер у меня EL-Skyport Transmitter Speed 19350, но должен работать с любым EL-Skyport Transmitter.
Принципиальная схема:
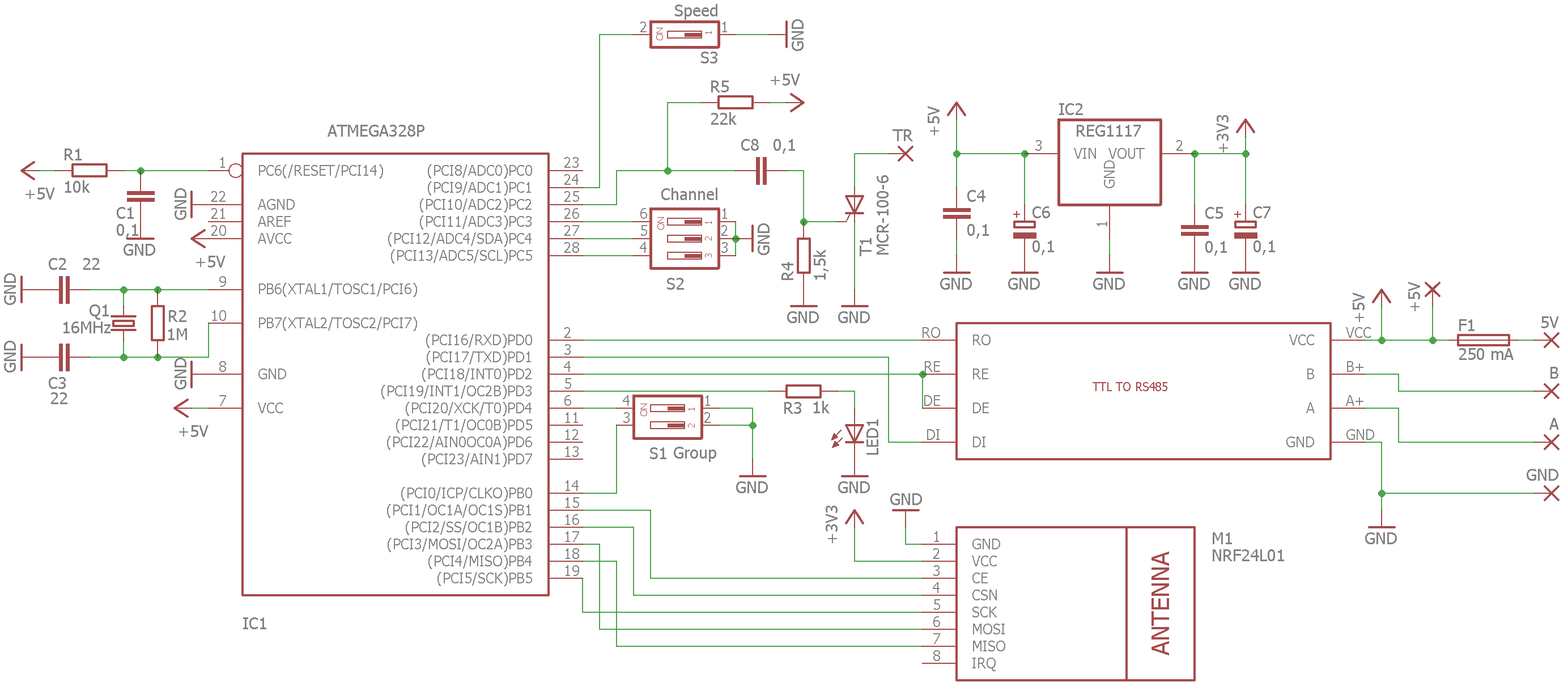
Переключение режимов “Speed” и “Standard”, канала и группы происходит с помощью тумблеров. Замкнутое положение тумблера S3 – режим “Standard”. Режимы нельзя сменить во время работы, считывание режима проходит в первые секунды после включения.
В качестве корпуса для я использовал корпус для РЭА К-4 (размеры 65х45х22) из Ozon. В качестве разъема Разъём DIN 7-0251 6p с удаленным центральным контактом.


Скетч:
/*
Трансивер для вспышек Elinchrom Style RX, Ranger RX. Данная версия программы работает
только в качестве приемника в режимaх “Speed” и “Standard”. Принимает следующие команды: запуск вспышки, увеличение
мощности вспышки, уменьшение мощности вспышки, включение пилотного света, выключение пилотного света.
Не работает с EL-Skyport USB.
Transceiver for Elinchrom Style RX, Ranger RX flashes. This version of the program works
only as a receiver in “Speed” and “Standard” modes. Receive the following commands: trig flash, increase
flash power, reduce flash power, turn on modeling light, turn off modeling light.
Don't compatible with EL-Skyport USB.
2024 Andrei Kuzmik
instagram: @andrei_kuzmik
vk: https://vk.com/id709658769
e-mail: kuzmik.andrej@yandex.by
*/
#include <SPI.h> // Подключаем библиотеку для работы с шиной SPI
#include <nRF24L01.h> // Подключаем файл настроек из библиотеки RF24
#include <RF24.h> // Подключаем библиотеку для работы с nRF24L01+
RF24 radio(9, 10); // Создаём объект radio для работы с библиотекой RF24, указывая номера выводов nRF24L01+ (CE, CSN)
byte radioBytes[2]; // Команда по радио
byte serialAnswBytes[22]; // Ответ по RS
byte pipeAddress[3] = { 0x8F, 0xCB, 0xAD }; // адрес pipe
unsigned long prevLedOff; // время предыдущего выключения светодиода
byte flAddr = 0; // Адрес вспышки
byte devGroup; // Группа приемника
byte devChannel; // Канал приемника
bool isSpeed; // Speed режим
#define txPin 2 // Pin для передачи по RS485
#define ledPin 3 // Pin светодиода
#define trigPin 16 // Pin запуска вспышки
#define groupPin1 4 // Pin переключателя группы 1
#define groupPin2 8 // Pin переключателя группы 2
#define channelPin1 17 // Pin переключателя канала 1
#define channelPin2 18 // Pin переключателя канала 2
#define channelPin3 19 // Pin переключателя канала 3
#define speedPin 15 // Pin переключателя Speed/normal
void setup() {
pinMode(txPin, OUTPUT); // Устанавливаем Pin для нвправления передачи
pinMode(ledPin, OUTPUT); // Устанавливаем Pin для светодиода
pinMode(trigPin, OUTPUT); // Устанавливаем Pin запуска вспышки
digitalWrite(trigPin, LOW); // Выкл спуск
digitalWrite(txPin, LOW); // RS485 прием
Serial.begin(9600);
Serial.setTimeout(100);
// Устанавливаем пины для переключателей группы, канала, скорости:
pinMode(groupPin1, INPUT_PULLUP);
pinMode(groupPin2, INPUT_PULLUP);
pinMode(channelPin1, INPUT_PULLUP);
pinMode(channelPin2, INPUT_PULLUP);
pinMode(channelPin3, INPUT_PULLUP);
pinMode(speedPin, INPUT_PULLUP);
// Определяем группу:
byte groupNumb = 0;
bitWrite(groupNumb, 0, !digitalRead(groupPin1));
bitWrite(groupNumb, 1, !digitalRead(groupPin2));
switch (groupNumb) {
case 0:
devGroup = 0xC0;
break;
case 1:
devGroup = 0xD0;
break;
case 2:
devGroup = 0xE0;
break;
case 3:
devGroup = 0xF0;
break;
}
// Определяем канал:
byte channelNumb = 0;
bitWrite(channelNumb, 0, !digitalRead(channelPin1));
bitWrite(channelNumb, 1, !digitalRead(channelPin2));
bitWrite(channelNumb, 2, !digitalRead(channelPin3));
switch (channelNumb) {
case 0:
devChannel = 0x38; // 1 = 2456 MHz (0x38)
break;
case 1:
devChannel = 0x3A; // 2 = 2458 MHz (0x3A)
break;
case 2:
devChannel = 0x3C; // 3 = 2460 MHz (0x3C)
break;
case 3:
devChannel = 0x3E; // 4 = 2462 MHz (0x3E)
break;
case 4:
devChannel = 0x45; // 5 = 2469 MHz (0x45)
break;
case 5:
devChannel = 0x47; // 6 = 2471 MHz (0x47)
break;
case 6:
devChannel = 0x49; // 7 = 2473 MHz (0x49)
break;
case 7:
devChannel = 0x4B; // 8 = 2475 MHz (0x4B)
break;
}
// Определяем скорость
if (digitalRead(speedPin)) { // Уровень высокий, выключатель отключен, режим Speed
isSpeed = true;
} else {
isSpeed = false;
}
byte srchAddr = 128;
do { // Поиск вспышки
if (getFlashData(255) == true) { // Обращение к вспышке через широковещательный адрес 255
flAddr = 255;
}
delay(100);
} while (flAddr == 0);
digitalWrite(ledPin, HIGH); // Светодиод включен
radio.begin(); // Инициируем работу nRF24L01+
radio.setCRCLength(RF24_CRC_8); // устанавливаем длину контрольной суммы
delay(10);
radio.setAutoAck(false); // Отключаем auto-acknowledgement
radio.setRetries(0, 0); // Выключаем функцию auto-retry
radio.setAddressWidth(3); // Устанавливаем длину адреса pipe
radio.setChannel(devChannel); // Указываем канал передачи данных
if (isSpeed) { // Устанавливаем скорость передачи данных (RF24_250KBPS стандартный режим, RF24_1MBPS для режима Speed)
radio.setDataRate(RF24_1MBPS);
} else {
radio.setDataRate(RF24_250KBPS);
}
radio.setPALevel(RF24_PA_HIGH); // Указываем мощность передатчика (RF24_PA_MIN=-18dBm, RF24_PA_LOW=-12dBm, RF24_PA_HIGH=-6dBm, RF24_PA_MAX=0dBm)
radio.openReadingPipe(0, pipeAddress); // Открываем 0 трубу чтения с идентификатором
radio.setPayloadSize(2); // Устанавливаем размер payload в 2 байта
radio.startListening();
}
void loop() {
// включение светодиода, если время выключения вышло
if (millis() - prevLedOff > 100) {
digitalWrite(ledPin, HIGH); // Светодиод включен
}
// Прием по радио и потправка по RS485
if (radio.available()) { // Если в буфере имеются принятые данные
radio.read(&radioBytes, sizeof(radioBytes)); // Читаем данные в массив data и указываем сколько байт читать
if (radioBytes[0] == devGroup || radioBytes[0] == 0xFF) { // Если группа соответствует приемнику
byte serialSendBytes[4] = { 0, 0, 0, 0 };
serialSendBytes[0] = flAddr;
switch (radioBytes[1]) {
case 0x00: // Trig
digitalWrite(trigPin, HIGH); // Вкл спуск
delay(1);
digitalWrite(trigPin, LOW); // Выкл спуск
delay(99);
break;
case 0x01: // Мощность вспышки +
if (getFlashData(flAddr) == true) {
serialSendBytes[1] = 80;
serialSendBytes[2] = serialAnswBytes[6] + 1;
send2Flash(serialSendBytes);
}
break;
case 0x02: // Мощность вспышки -
if (getFlashData(flAddr) == true) {
serialSendBytes[1] = 80;
serialSendBytes[2] = serialAnswBytes[6] - 1;
send2Flash(serialSendBytes);
}
break;
case 0x10: // Включить пилотный свет
if (getFlashData(flAddr) == true) {
serialSendBytes[1] = 88;
serialSendBytes[2] = serialAnswBytes[2];
bitSet(serialSendBytes[2], 3);
bitClear(serialSendBytes[2], 4);
send2Flash(serialSendBytes);
}
break;
case 0x20: // Выключить пилотный свет
if (getFlashData(flAddr) == true) {
serialSendBytes[1] = 88;
serialSendBytes[2] = serialAnswBytes[2];
bitClear(serialSendBytes[2], 3);
bitClear(serialSendBytes[2], 4);
send2Flash(serialSendBytes);
}
break;
}
radio.flush_rx(); // очистка приемного буфера т.к. передается несколько команд подряд
}
if (millis() - prevLedOff > 200) {
digitalWrite(ledPin, LOW); // Светодиод выключен
prevLedOff = millis(); // Запомнить время выключения светодиода
}
}
}
bool getFlashData(byte addr) {
byte getCommand[4] = { 0, 71, 1, 0 };
getCommand[0] = addr;
digitalWrite(txPin, HIGH); // RS485 передача
Serial.write(getCommand, sizeof(getCommand));
delay(5); // Задержка на время передачи по RS485
digitalWrite(txPin, LOW); // RS485 прием
if (Serial.readBytes(serialAnswBytes, 22) == 22 && serialAnswBytes[0] > 127 && serialAnswBytes[21] == 0) { // Если пришел корректный ответ
delay(5);
return true;
} else {
delay(5);
return false;
}
}
void send2Flash(byte sndData[4]) {
digitalWrite(txPin, HIGH); // RS485 передача
Serial.write(sndData, 4);
delay(5); // Задержка на время передачи по RS485
digitalWrite(txPin, LOW); // RS485 прием
}
Все материалы для сборки можно скачать тут: Elinchrom_RX – Google Диск
Видео с демонстрацией работы: https://youtu.be/mE6DMrXS9lY