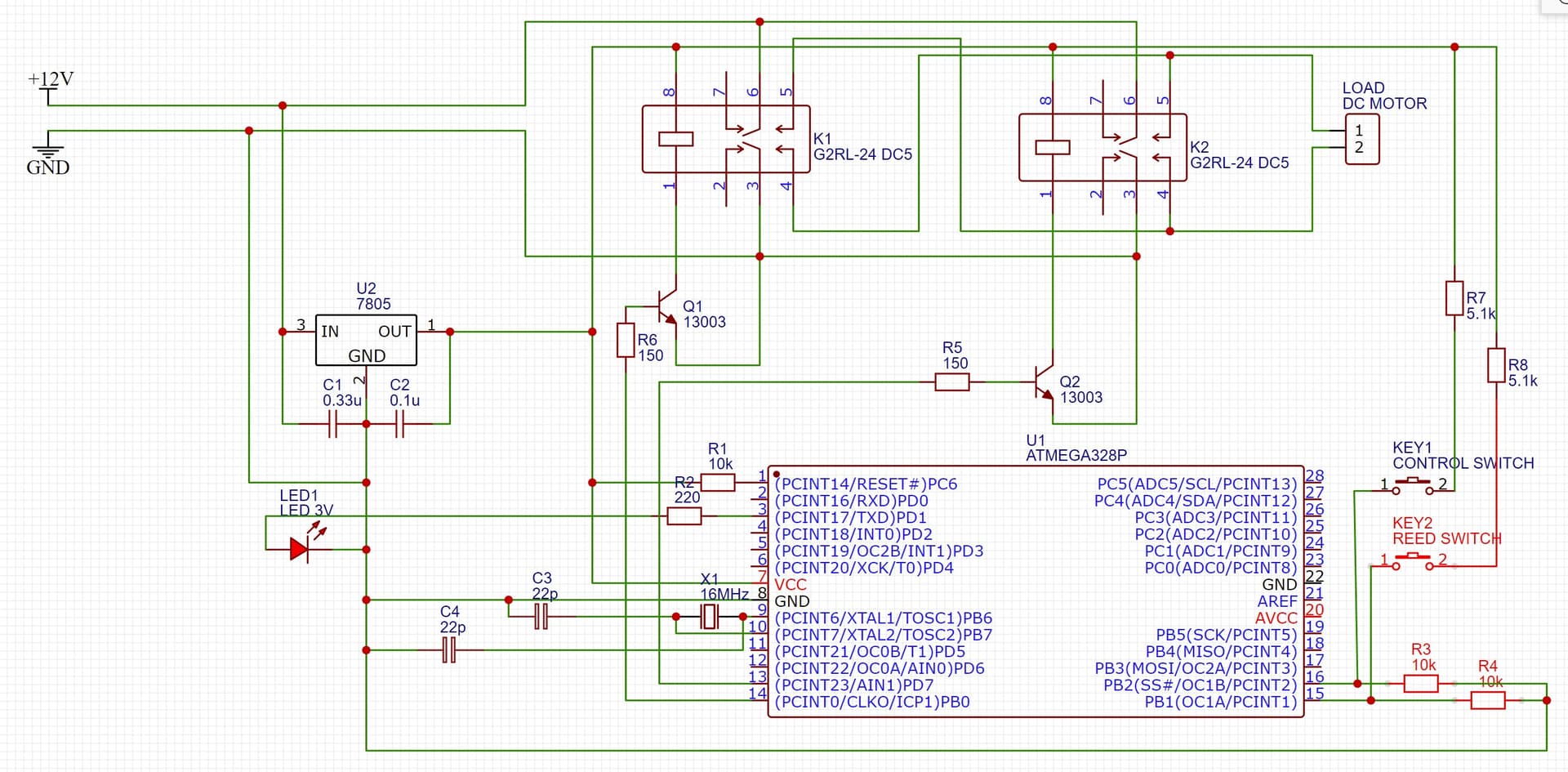
Питание 12В от обычного импульсного БП, мощность 200Вт (с избытком).
Нужно при замыкании переключателя CONTROL SWITCH в зависимости от положения геркона REED SWITCH подать на нагрузку DC MOTOR 12В в прямой или обратной полярности, моторчик покрутится и потом контроллер опять считает значение геркона и моргнёт светодиодом 1 длинный если геркон замкнут или 3 короткие если геркон разомкнут.
Программа простая на С, всё в цикле, никаких без прерываний, и всё работает.
Но вот иногда происходит следующее:
мотор не дожимает до конца, прерывает вращение где-то в середине.
после этого светодиод тоже никак не моргает, хотя по коду должен моргнуть либо так либо иначе.
После этого опять всё работает.
Вероятно какие-то помехи вводят МК в ступор, но не подвешивают - так иногда подглючивая всё работает уже пару недель.
Как повысить защиту от помех, посоветуйте, и да пребудет с Вами сила, свежий кофе и Чак Норрис!
показываю прогу, принимаю любые советы как улучшить, AVR я использую только для несложных прототипов типа вот этого поэтому глубоких знаний платформы не имею
Запись в этот пин осталась от экспериментов, согласен что нужно удалить, но ведь ничего от этой записи и не случится, она мозолит глаз да, делает что-то плохое нет
Выкинул запись в pinSensor, проверку на 2сек оставил, это чтобы не было коллизий на старте включении питания питания. Прошил МК, поставил.
Я не возношу свою прогу в эталон, но и считать её ахинеей отказываюсь - это обычная прога.
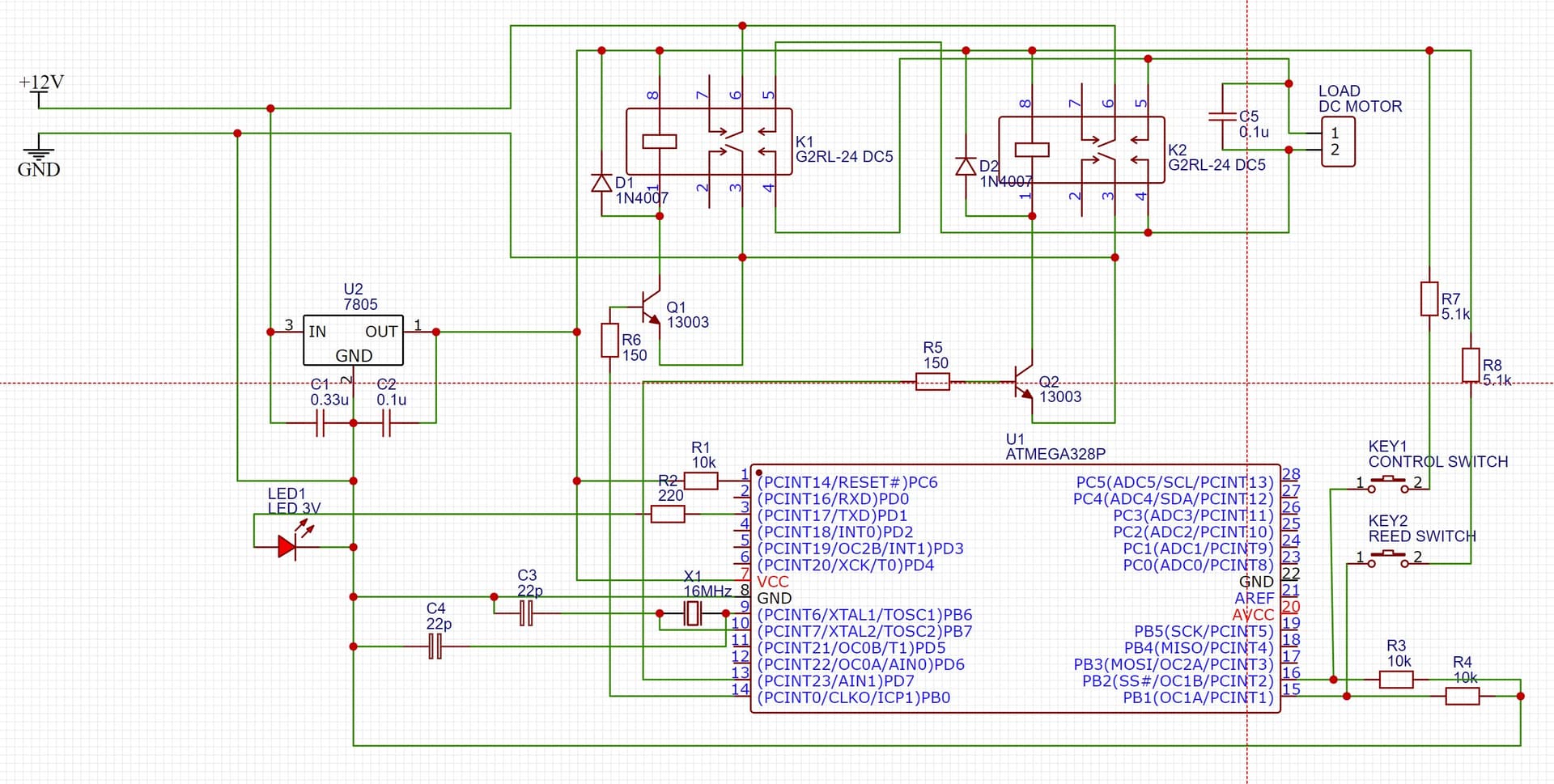
Меня интересуют больше рекомендации по схеме - где кондёр или индуктивность поставить.
я тута подумал пока паял, а если пусковой ток мотора крадёт всё питание от МК и тот уходит в ресет? и как с этим бороться? может поставить 1000 мкФ или тип того на питание МК?