А ты не на название скетча смотри, может IDE для программатора только один файл и создает ))
Ты наерна Краснодарскую сельхозакадемию закончил? Колись, там жеж си шарп в почёте
Я в политехе учился. Давно когда-то
Может) каждая модель МК AVR имеет две области памяти, одна из которых допускает одновременное чтение и запись. RWW и NRWW.
Загрузчик может обновлять сам себя.
Удивил. Вся область флэш перезаписываемая. Нужно только уметь ею пользоваться. Суть то во фьюзах))
Листинги:
Mega2560
Спойлер
C:\TEMP\arduino_build_452931\BlinkWithoutDelay.ino.elf: file format elf32-avr
Sections:
Idx Name Size VMA LMA File off Algn
0 .data 00000000 00800200 00800200 00000630 2**0
CONTENTS, ALLOC, LOAD, DATA
1 .text 000005bc 00000000 00000000 00000074 2**1
CONTENTS, ALLOC, LOAD, READONLY, CODE
2 .bss 0000000f 00800200 00800200 00000630 2**0
ALLOC
3 .comment 00000011 00000000 00000000 00000630 2**0
CONTENTS, READONLY
4 .note.gnu.avr.deviceinfo 00000040 00000000 00000000 00000644 2**2
CONTENTS, READONLY
5 .debug_aranges 00000088 00000000 00000000 00000688 2**3
CONTENTS, READONLY, DEBUGGING
6 .debug_info 00001443 00000000 00000000 00000710 2**0
CONTENTS, READONLY, DEBUGGING
7 .debug_abbrev 00000d53 00000000 00000000 00001b53 2**0
CONTENTS, READONLY, DEBUGGING
8 .debug_line 000005d7 00000000 00000000 000028a6 2**0
CONTENTS, READONLY, DEBUGGING
9 .debug_frame 0000005c 00000000 00000000 00002e80 2**2
CONTENTS, READONLY, DEBUGGING
10 .debug_str 0000065e 00000000 00000000 00002edc 2**0
CONTENTS, READONLY, DEBUGGING
11 .debug_loc 00000444 00000000 00000000 0000353a 2**0
CONTENTS, READONLY, DEBUGGING
12 .debug_ranges 000000c8 00000000 00000000 0000397e 2**0
CONTENTS, READONLY, DEBUGGING
Disassembly of section .text:
00000000 <__vectors>:
0: 0c 94 17 01 jmp 0x22e ; 0x22e <__ctors_end>
4: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
8: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
c: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
10: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
14: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
18: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
1c: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
20: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
24: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
28: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
2c: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
30: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
34: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
38: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
3c: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
40: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
44: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
48: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
4c: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
50: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
54: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
58: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
5c: 0c 94 2d 01 jmp 0x25a ; 0x25a <__vector_23>
60: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
64: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
68: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
6c: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
70: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
74: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
78: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
7c: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
80: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
84: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
88: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
8c: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
90: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
94: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
98: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
9c: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
a0: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
a4: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
a8: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
ac: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
b0: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
b4: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
b8: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
bc: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
c0: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
c4: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
c8: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
cc: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
d0: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
d4: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
d8: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
dc: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
e0: 0c 94 2b 01 jmp 0x256 ; 0x256 <__bad_interrupt>
000000e4 <__trampolines_start>:
e4: 0c 94 72 02 jmp 0x4e4 ; 0x4e4 <__LOCK_REGION_LENGTH__+0xe4>
e8: 0c 94 ce 02 jmp 0x59c ; 0x59c <__LOCK_REGION_LENGTH__+0x19c>
ec: 0c 94 a4 02 jmp 0x548 ; 0x548 <__LOCK_REGION_LENGTH__+0x148>
f0: 0c 94 77 02 jmp 0x4ee ; 0x4ee <__LOCK_REGION_LENGTH__+0xee>
f4: 0c 94 c0 02 jmp 0x580 ; 0x580 <__LOCK_REGION_LENGTH__+0x180>
f8: 0c 94 93 02 jmp 0x526 ; 0x526 <__LOCK_REGION_LENGTH__+0x126>
fc: 0c 94 9b 02 jmp 0x536 ; 0x536 <__LOCK_REGION_LENGTH__+0x136>
100: 0c 94 97 02 jmp 0x52e ; 0x52e <__LOCK_REGION_LENGTH__+0x12e>
104: 0c 94 b2 02 jmp 0x564 ; 0x564 <__LOCK_REGION_LENGTH__+0x164>
108: 0c 94 ca 02 jmp 0x594 ; 0x594 <__LOCK_REGION_LENGTH__+0x194>
10c: 0c 94 8f 02 jmp 0x51e ; 0x51e <__LOCK_REGION_LENGTH__+0x11e>
110: 0c 94 a8 02 jmp 0x550 ; 0x550 <__LOCK_REGION_LENGTH__+0x150>
114: 0c 94 bc 02 jmp 0x578 ; 0x578 <__LOCK_REGION_LENGTH__+0x178>
118: 0c 94 b6 02 jmp 0x56c ; 0x56c <__LOCK_REGION_LENGTH__+0x16c>
11c: 0c 94 ae 02 jmp 0x55c ; 0x55c <__LOCK_REGION_LENGTH__+0x15c>
120: 0c 94 9e 02 jmp 0x53c ; 0x53c <__LOCK_REGION_LENGTH__+0x13c>
124: 0c 94 c4 02 jmp 0x588 ; 0x588 <__LOCK_REGION_LENGTH__+0x188>
00000128 <__trampolines_end>:
128: 00 00 nop
12a: 21 00 .word 0x0021 ; ????
12c: 24 00 .word 0x0024 ; ????
12e: 27 00 .word 0x0027 ; ????
130: 2a 00 .word 0x002a ; ????
132: 2d 00 .word 0x002d ; ????
134: 30 00 .word 0x0030 ; ????
136: 33 00 .word 0x0033 ; ????
138: 01 01 movw r0, r2
13a: 00 00 nop
13c: 04 01 movw r0, r8
13e: 07 01 movw r0, r14
140: 0a 01 movw r0, r20
00000142 <port_to_output_PGM>:
142: 00 00 22 00 25 00 28 00 2b 00 2e 00 31 00 34 00 ..".%.(.+...1.4.
152: 02 01 00 00 05 01 08 01 0b 01 ..........
0000015c <digital_pin_to_port_PGM>:
15c: 05 05 05 05 07 05 08 08 08 08 02 02 02 02 0a 0a ................
16c: 08 08 04 04 04 04 01 01 01 01 01 01 01 01 03 03 ................
17c: 03 03 03 03 03 03 04 07 07 07 0c 0c 0c 0c 0c 0c ................
18c: 0c 0c 02 02 02 02 06 06 06 06 06 06 06 06 0b 0b ................
19c: 0b 0b 0b 0b 0b 0b ......
000001a2 <digital_pin_to_bit_mask_PGM>:
1a2: 01 02 10 20 20 08 08 10 20 40 10 20 40 80 02 01 ... ... @. @...
1b2: 02 01 08 04 02 01 01 02 04 08 10 20 40 80 80 40 ........... @..@
1c2: 20 10 08 04 02 01 80 04 02 01 80 40 20 10 08 04 ..........@ ...
1d2: 02 01 08 04 02 01 01 02 04 08 10 20 40 80 01 02 ........... @...
1e2: 04 08 10 20 40 80 ... @.
000001e8 <digital_pin_to_timer_PGM>:
1e8: 00 00 0a 0b 02 09 0c 0d 0e 08 07 03 04 01 00 00 ................
...
214: 12 11 10 00 00 00 00 00 00 00 00 00 00 00 00 00 ................
...
0000022e <__ctors_end>:
22e: 11 24 eor r1, r1
230: 1f be out 0x3f, r1 ; 63
232: cf ef ldi r28, 0xFF ; 255
234: d1 e2 ldi r29, 0x21 ; 33
236: de bf out 0x3e, r29 ; 62
238: cd bf out 0x3d, r28 ; 61
23a: 00 e0 ldi r16, 0x00 ; 0
23c: 0c bf out 0x3c, r16 ; 60
0000023e <__do_clear_bss>:
23e: 22 e0 ldi r18, 0x02 ; 2
240: a0 e0 ldi r26, 0x00 ; 0
242: b2 e0 ldi r27, 0x02 ; 2
244: 01 c0 rjmp .+2 ; 0x248 <.do_clear_bss_start>
00000246 <.do_clear_bss_loop>:
246: 1d 92 st X+, r1
00000248 <.do_clear_bss_start>:
248: af 30 cpi r26, 0x0F ; 15
24a: b2 07 cpc r27, r18
24c: e1 f7 brne .-8 ; 0x246 <.do_clear_bss_loop>
24e: 0e 94 77 01 call 0x2ee ; 0x2ee <main>
252: 0c 94 dc 02 jmp 0x5b8 ; 0x5b8 <_exit>
00000256 <__bad_interrupt>:
256: 0c 94 00 00 jmp 0 ; 0x0 <__vectors>
0000025a <__vector_23>:
#if defined(TIM0_OVF_vect)
ISR(TIM0_OVF_vect)
#else
ISR(TIMER0_OVF_vect)
#endif
{
25a: 1f 92 push r1
25c: 0f 92 push r0
25e: 0f b6 in r0, 0x3f ; 63
260: 0f 92 push r0
262: 11 24 eor r1, r1
264: 2f 93 push r18
266: 3f 93 push r19
268: 8f 93 push r24
26a: 9f 93 push r25
26c: af 93 push r26
26e: bf 93 push r27
// copy these to local variables so they can be stored in registers
// (volatile variables must be read from memory on every access)
unsigned long m = timer0_millis;
270: 80 91 05 02 lds r24, 0x0205 ; 0x800205 <timer0_millis>
274: 90 91 06 02 lds r25, 0x0206 ; 0x800206 <timer0_millis+0x1>
278: a0 91 07 02 lds r26, 0x0207 ; 0x800207 <timer0_millis+0x2>
27c: b0 91 08 02 lds r27, 0x0208 ; 0x800208 <timer0_millis+0x3>
unsigned char f = timer0_fract;
280: 30 91 04 02 lds r19, 0x0204 ; 0x800204 <timer0_fract>
m += MILLIS_INC;
f += FRACT_INC;
284: 23 e0 ldi r18, 0x03 ; 3
286: 23 0f add r18, r19
if (f >= FRACT_MAX) {
288: 2d 37 cpi r18, 0x7D ; 125
28a: 58 f5 brcc .+86 ; 0x2e2 <__vector_23+0x88>
// copy these to local variables so they can be stored in registers
// (volatile variables must be read from memory on every access)
unsigned long m = timer0_millis;
unsigned char f = timer0_fract;
m += MILLIS_INC;
28c: 01 96 adiw r24, 0x01 ; 1
28e: a1 1d adc r26, r1
290: b1 1d adc r27, r1
if (f >= FRACT_MAX) {
f -= FRACT_MAX;
m += 1;
}
timer0_fract = f;
292: 20 93 04 02 sts 0x0204, r18 ; 0x800204 <timer0_fract>
timer0_millis = m;
296: 80 93 05 02 sts 0x0205, r24 ; 0x800205 <timer0_millis>
29a: 90 93 06 02 sts 0x0206, r25 ; 0x800206 <timer0_millis+0x1>
29e: a0 93 07 02 sts 0x0207, r26 ; 0x800207 <timer0_millis+0x2>
2a2: b0 93 08 02 sts 0x0208, r27 ; 0x800208 <timer0_millis+0x3>
timer0_overflow_count++;
2a6: 80 91 00 02 lds r24, 0x0200 ; 0x800200 <_edata>
2aa: 90 91 01 02 lds r25, 0x0201 ; 0x800201 <_edata+0x1>
2ae: a0 91 02 02 lds r26, 0x0202 ; 0x800202 <_edata+0x2>
2b2: b0 91 03 02 lds r27, 0x0203 ; 0x800203 <_edata+0x3>
2b6: 01 96 adiw r24, 0x01 ; 1
2b8: a1 1d adc r26, r1
2ba: b1 1d adc r27, r1
2bc: 80 93 00 02 sts 0x0200, r24 ; 0x800200 <_edata>
2c0: 90 93 01 02 sts 0x0201, r25 ; 0x800201 <_edata+0x1>
2c4: a0 93 02 02 sts 0x0202, r26 ; 0x800202 <_edata+0x2>
2c8: b0 93 03 02 sts 0x0203, r27 ; 0x800203 <_edata+0x3>
}
2cc: bf 91 pop r27
2ce: af 91 pop r26
2d0: 9f 91 pop r25
2d2: 8f 91 pop r24
2d4: 3f 91 pop r19
2d6: 2f 91 pop r18
2d8: 0f 90 pop r0
2da: 0f be out 0x3f, r0 ; 63
2dc: 0f 90 pop r0
2de: 1f 90 pop r1
2e0: 18 95 reti
unsigned char f = timer0_fract;
m += MILLIS_INC;
f += FRACT_INC;
if (f >= FRACT_MAX) {
f -= FRACT_MAX;
2e2: 26 e8 ldi r18, 0x86 ; 134
2e4: 23 0f add r18, r19
m += 1;
2e6: 02 96 adiw r24, 0x02 ; 2
2e8: a1 1d adc r26, r1
2ea: b1 1d adc r27, r1
2ec: d2 cf rjmp .-92 ; 0x292 <__vector_23+0x38>
000002ee <main>:
void init()
{
// this needs to be called before setup() or some functions won't
// work there
sei();
2ee: 78 94 sei
// on the ATmega168, timer 0 is also used for fast hardware pwm
// (using phase-correct PWM would mean that timer 0 overflowed half as often
// resulting in different millis() behavior on the ATmega8 and ATmega168)
#if defined(TCCR0A) && defined(WGM01)
sbi(TCCR0A, WGM01);
2f0: 84 b5 in r24, 0x24 ; 36
2f2: 82 60 ori r24, 0x02 ; 2
2f4: 84 bd out 0x24, r24 ; 36
sbi(TCCR0A, WGM00);
2f6: 84 b5 in r24, 0x24 ; 36
2f8: 81 60 ori r24, 0x01 ; 1
2fa: 84 bd out 0x24, r24 ; 36
// this combination is for the standard atmega8
sbi(TCCR0, CS01);
sbi(TCCR0, CS00);
#elif defined(TCCR0B) && defined(CS01) && defined(CS00)
// this combination is for the standard 168/328/1280/2560
sbi(TCCR0B, CS01);
2fc: 85 b5 in r24, 0x25 ; 37
2fe: 82 60 ori r24, 0x02 ; 2
300: 85 bd out 0x25, r24 ; 37
sbi(TCCR0B, CS00);
302: 85 b5 in r24, 0x25 ; 37
304: 81 60 ori r24, 0x01 ; 1
306: 85 bd out 0x25, r24 ; 37
// enable timer 0 overflow interrupt
#if defined(TIMSK) && defined(TOIE0)
sbi(TIMSK, TOIE0);
#elif defined(TIMSK0) && defined(TOIE0)
sbi(TIMSK0, TOIE0);
308: 80 91 6e 00 lds r24, 0x006E ; 0x80006e <__TEXT_REGION_LENGTH__+0x70006e>
30c: 81 60 ori r24, 0x01 ; 1
30e: 80 93 6e 00 sts 0x006E, r24 ; 0x80006e <__TEXT_REGION_LENGTH__+0x70006e>
// this is better for motors as it ensures an even waveform
// note, however, that fast pwm mode can achieve a frequency of up
// 8 MHz (with a 16 MHz clock) at 50% duty cycle
#if defined(TCCR1B) && defined(CS11) && defined(CS10)
TCCR1B = 0;
312: 10 92 81 00 sts 0x0081, r1 ; 0x800081 <__TEXT_REGION_LENGTH__+0x700081>
// set timer 1 prescale factor to 64
sbi(TCCR1B, CS11);
316: 80 91 81 00 lds r24, 0x0081 ; 0x800081 <__TEXT_REGION_LENGTH__+0x700081>
31a: 82 60 ori r24, 0x02 ; 2
31c: 80 93 81 00 sts 0x0081, r24 ; 0x800081 <__TEXT_REGION_LENGTH__+0x700081>
#if F_CPU >= 8000000L
sbi(TCCR1B, CS10);
320: 80 91 81 00 lds r24, 0x0081 ; 0x800081 <__TEXT_REGION_LENGTH__+0x700081>
324: 81 60 ori r24, 0x01 ; 1
326: 80 93 81 00 sts 0x0081, r24 ; 0x800081 <__TEXT_REGION_LENGTH__+0x700081>
sbi(TCCR1, CS10);
#endif
#endif
// put timer 1 in 8-bit phase correct pwm mode
#if defined(TCCR1A) && defined(WGM10)
sbi(TCCR1A, WGM10);
32a: 80 91 80 00 lds r24, 0x0080 ; 0x800080 <__TEXT_REGION_LENGTH__+0x700080>
32e: 81 60 ori r24, 0x01 ; 1
330: 80 93 80 00 sts 0x0080, r24 ; 0x800080 <__TEXT_REGION_LENGTH__+0x700080>
// set timer 2 prescale factor to 64
#if defined(TCCR2) && defined(CS22)
sbi(TCCR2, CS22);
#elif defined(TCCR2B) && defined(CS22)
sbi(TCCR2B, CS22);
334: 80 91 b1 00 lds r24, 0x00B1 ; 0x8000b1 <__TEXT_REGION_LENGTH__+0x7000b1>
338: 84 60 ori r24, 0x04 ; 4
33a: 80 93 b1 00 sts 0x00B1, r24 ; 0x8000b1 <__TEXT_REGION_LENGTH__+0x7000b1>
// configure timer 2 for phase correct pwm (8-bit)
#if defined(TCCR2) && defined(WGM20)
sbi(TCCR2, WGM20);
#elif defined(TCCR2A) && defined(WGM20)
sbi(TCCR2A, WGM20);
33e: 80 91 b0 00 lds r24, 0x00B0 ; 0x8000b0 <__TEXT_REGION_LENGTH__+0x7000b0>
342: 81 60 ori r24, 0x01 ; 1
344: 80 93 b0 00 sts 0x00B0, r24 ; 0x8000b0 <__TEXT_REGION_LENGTH__+0x7000b0>
//#else
// Timer 2 not finished (may not be present on this CPU)
#endif
#if defined(TCCR3B) && defined(CS31) && defined(WGM30)
sbi(TCCR3B, CS31); // set timer 3 prescale factor to 64
348: 80 91 91 00 lds r24, 0x0091 ; 0x800091 <__TEXT_REGION_LENGTH__+0x700091>
34c: 82 60 ori r24, 0x02 ; 2
34e: 80 93 91 00 sts 0x0091, r24 ; 0x800091 <__TEXT_REGION_LENGTH__+0x700091>
sbi(TCCR3B, CS30);
352: 80 91 91 00 lds r24, 0x0091 ; 0x800091 <__TEXT_REGION_LENGTH__+0x700091>
356: 81 60 ori r24, 0x01 ; 1
358: 80 93 91 00 sts 0x0091, r24 ; 0x800091 <__TEXT_REGION_LENGTH__+0x700091>
sbi(TCCR3A, WGM30); // put timer 3 in 8-bit phase correct pwm mode
35c: 80 91 90 00 lds r24, 0x0090 ; 0x800090 <__TEXT_REGION_LENGTH__+0x700090>
360: 81 60 ori r24, 0x01 ; 1
362: 80 93 90 00 sts 0x0090, r24 ; 0x800090 <__TEXT_REGION_LENGTH__+0x700090>
sbi(TCCR4D, WGM40); // put timer 4 in phase- and frequency-correct PWM mode
sbi(TCCR4A, PWM4A); // enable PWM mode for comparator OCR4A
sbi(TCCR4C, PWM4D); // enable PWM mode for comparator OCR4D
#else /* beginning of timer4 block for ATMEGA1280 and ATMEGA2560 */
#if defined(TCCR4B) && defined(CS41) && defined(WGM40)
sbi(TCCR4B, CS41); // set timer 4 prescale factor to 64
366: 80 91 a1 00 lds r24, 0x00A1 ; 0x8000a1 <__TEXT_REGION_LENGTH__+0x7000a1>
36a: 82 60 ori r24, 0x02 ; 2
36c: 80 93 a1 00 sts 0x00A1, r24 ; 0x8000a1 <__TEXT_REGION_LENGTH__+0x7000a1>
sbi(TCCR4B, CS40);
370: 80 91 a1 00 lds r24, 0x00A1 ; 0x8000a1 <__TEXT_REGION_LENGTH__+0x7000a1>
374: 81 60 ori r24, 0x01 ; 1
376: 80 93 a1 00 sts 0x00A1, r24 ; 0x8000a1 <__TEXT_REGION_LENGTH__+0x7000a1>
sbi(TCCR4A, WGM40); // put timer 4 in 8-bit phase correct pwm mode
37a: 80 91 a0 00 lds r24, 0x00A0 ; 0x8000a0 <__TEXT_REGION_LENGTH__+0x7000a0>
37e: 81 60 ori r24, 0x01 ; 1
380: 80 93 a0 00 sts 0x00A0, r24 ; 0x8000a0 <__TEXT_REGION_LENGTH__+0x7000a0>
#endif
#endif /* end timer4 block for ATMEGA1280/2560 and similar */
#if defined(TCCR5B) && defined(CS51) && defined(WGM50)
sbi(TCCR5B, CS51); // set timer 5 prescale factor to 64
384: 80 91 21 01 lds r24, 0x0121 ; 0x800121 <__TEXT_REGION_LENGTH__+0x700121>
388: 82 60 ori r24, 0x02 ; 2
38a: 80 93 21 01 sts 0x0121, r24 ; 0x800121 <__TEXT_REGION_LENGTH__+0x700121>
sbi(TCCR5B, CS50);
38e: 80 91 21 01 lds r24, 0x0121 ; 0x800121 <__TEXT_REGION_LENGTH__+0x700121>
392: 81 60 ori r24, 0x01 ; 1
394: 80 93 21 01 sts 0x0121, r24 ; 0x800121 <__TEXT_REGION_LENGTH__+0x700121>
sbi(TCCR5A, WGM50); // put timer 5 in 8-bit phase correct pwm mode
398: 80 91 20 01 lds r24, 0x0120 ; 0x800120 <__TEXT_REGION_LENGTH__+0x700120>
39c: 81 60 ori r24, 0x01 ; 1
39e: 80 93 20 01 sts 0x0120, r24 ; 0x800120 <__TEXT_REGION_LENGTH__+0x700120>
#endif
#if defined(ADCSRA)
// set a2d prescaler so we are inside the desired 50-200 KHz range.
#if F_CPU >= 16000000 // 16 MHz / 128 = 125 KHz
sbi(ADCSRA, ADPS2);
3a2: 80 91 7a 00 lds r24, 0x007A ; 0x80007a <__TEXT_REGION_LENGTH__+0x70007a>
3a6: 84 60 ori r24, 0x04 ; 4
3a8: 80 93 7a 00 sts 0x007A, r24 ; 0x80007a <__TEXT_REGION_LENGTH__+0x70007a>
sbi(ADCSRA, ADPS1);
3ac: 80 91 7a 00 lds r24, 0x007A ; 0x80007a <__TEXT_REGION_LENGTH__+0x70007a>
3b0: 82 60 ori r24, 0x02 ; 2
3b2: 80 93 7a 00 sts 0x007A, r24 ; 0x80007a <__TEXT_REGION_LENGTH__+0x70007a>
sbi(ADCSRA, ADPS0);
3b6: 80 91 7a 00 lds r24, 0x007A ; 0x80007a <__TEXT_REGION_LENGTH__+0x70007a>
3ba: 81 60 ori r24, 0x01 ; 1
3bc: 80 93 7a 00 sts 0x007A, r24 ; 0x80007a <__TEXT_REGION_LENGTH__+0x70007a>
cbi(ADCSRA, ADPS2);
cbi(ADCSRA, ADPS1);
sbi(ADCSRA, ADPS0);
#endif
// enable a2d conversions
sbi(ADCSRA, ADEN);
3c0: 80 91 7a 00 lds r24, 0x007A ; 0x80007a <__TEXT_REGION_LENGTH__+0x70007a>
3c4: 80 68 ori r24, 0x80 ; 128
3c6: 80 93 7a 00 sts 0x007A, r24 ; 0x80007a <__TEXT_REGION_LENGTH__+0x70007a>
// here so they can be used as normal digital i/o; they will be
// reconnected in Serial.begin()
#if defined(UCSRB)
UCSRB = 0;
#elif defined(UCSR0B)
UCSR0B = 0;
3ca: 10 92 c1 00 sts 0x00C1, r1 ; 0x8000c1 <__TEXT_REGION_LENGTH__+0x7000c1>
#include "wiring_private.h"
#include "pins_arduino.h"
void pinMode(uint8_t pin, uint8_t mode)
{
uint8_t bit = digitalPinToBitMask(pin);
3ce: cf ea ldi r28, 0xAF ; 175
3d0: d1 e0 ldi r29, 0x01 ; 1
3d2: fe 01 movw r30, r28
3d4: 24 91 lpm r18, Z
uint8_t port = digitalPinToPort(pin);
3d6: 09 e6 ldi r16, 0x69 ; 105
3d8: 11 e0 ldi r17, 0x01 ; 1
3da: f8 01 movw r30, r16
3dc: 84 91 lpm r24, Z
volatile uint8_t *reg, *out;
if (port == NOT_A_PIN) return;
3de: 88 23 and r24, r24
3e0: 99 f0 breq .+38 ; 0x408 <__LOCK_REGION_LENGTH__+0x8>
// JWS: can I let the optimizer do this?
reg = portModeRegister(port);
3e2: 90 e0 ldi r25, 0x00 ; 0
3e4: 88 0f add r24, r24
3e6: 99 1f adc r25, r25
3e8: fc 01 movw r30, r24
3ea: e8 5d subi r30, 0xD8 ; 216
3ec: fe 4f sbci r31, 0xFE ; 254
3ee: a5 91 lpm r26, Z+
3f0: b4 91 lpm r27, Z
out = portOutputRegister(port);
3f2: fc 01 movw r30, r24
3f4: ee 5b subi r30, 0xBE ; 190
3f6: fe 4f sbci r31, 0xFE ; 254
3f8: 85 91 lpm r24, Z+
3fa: 94 91 lpm r25, Z
cli();
*reg &= ~bit;
*out |= bit;
SREG = oldSREG;
} else {
uint8_t oldSREG = SREG;
3fc: 8f b7 in r24, 0x3f ; 63
cli();
3fe: f8 94 cli
*reg |= bit;
400: 9c 91 ld r25, X
402: 29 2b or r18, r25
404: 2c 93 st X, r18
SREG = oldSREG;
406: 8f bf out 0x3f, r24 ; 63
}
}
void digitalWrite(uint8_t pin, uint8_t val)
{
uint8_t timer = digitalPinToTimer(pin);
408: 95 ef ldi r25, 0xF5 ; 245
40a: c9 2e mov r12, r25
40c: 91 e0 ldi r25, 0x01 ; 1
40e: d9 2e mov r13, r25
setup();
for (;;) {
loop();
if (serialEventRun) serialEventRun();
410: 20 e0 ldi r18, 0x00 ; 0
412: e2 2e mov r14, r18
414: 20 e0 ldi r18, 0x00 ; 0
416: f2 2e mov r15, r18
// save the last time you blinked the LED
previousMillis = currentMillis;
// if the LED is off turn it on and vice-versa:
if (ledState == LOW) {
ledState = HIGH;
418: aa 24 eor r10, r10
41a: a3 94 inc r10
41c: b1 2c mov r11, r1
}
unsigned long millis()
{
unsigned long m;
uint8_t oldSREG = SREG;
41e: 2f b7 in r18, 0x3f ; 63
// disable interrupts while we read timer0_millis or we might get an
// inconsistent value (e.g. in the middle of a write to timer0_millis)
cli();
420: f8 94 cli
m = timer0_millis;
422: 80 91 05 02 lds r24, 0x0205 ; 0x800205 <timer0_millis>
426: 90 91 06 02 lds r25, 0x0206 ; 0x800206 <timer0_millis+0x1>
42a: a0 91 07 02 lds r26, 0x0207 ; 0x800207 <timer0_millis+0x2>
42e: b0 91 08 02 lds r27, 0x0208 ; 0x800208 <timer0_millis+0x3>
SREG = oldSREG;
432: 2f bf out 0x3f, r18 ; 63
// check to see if it's time to blink the LED; that is, if the difference
// between the current time and last time you blinked the LED is bigger than
// the interval at which you want to blink the LED.
unsigned long currentMillis = millis();
if (currentMillis - previousMillis >= interval) {
434: 40 91 0b 02 lds r20, 0x020B ; 0x80020b <previousMillis>
438: 50 91 0c 02 lds r21, 0x020C ; 0x80020c <previousMillis+0x1>
43c: 60 91 0d 02 lds r22, 0x020D ; 0x80020d <previousMillis+0x2>
440: 70 91 0e 02 lds r23, 0x020E ; 0x80020e <previousMillis+0x3>
444: 3c 01 movw r6, r24
446: 4d 01 movw r8, r26
448: 64 1a sub r6, r20
44a: 75 0a sbc r7, r21
44c: 86 0a sbc r8, r22
44e: 97 0a sbc r9, r23
450: b4 01 movw r22, r8
452: a3 01 movw r20, r6
454: 48 3e cpi r20, 0xE8 ; 232
456: 53 40 sbci r21, 0x03 ; 3
458: 61 05 cpc r22, r1
45a: 71 05 cpc r23, r1
45c: 08 f4 brcc .+2 ; 0x460 <__LOCK_REGION_LENGTH__+0x60>
45e: 58 c0 rjmp .+176 ; 0x510 <__LOCK_REGION_LENGTH__+0x110>
// save the last time you blinked the LED
previousMillis = currentMillis;
460: 80 93 0b 02 sts 0x020B, r24 ; 0x80020b <previousMillis>
464: 90 93 0c 02 sts 0x020C, r25 ; 0x80020c <previousMillis+0x1>
468: a0 93 0d 02 sts 0x020D, r26 ; 0x80020d <previousMillis+0x2>
46c: b0 93 0e 02 sts 0x020E, r27 ; 0x80020e <previousMillis+0x3>
// if the LED is off turn it on and vice-versa:
if (ledState == LOW) {
470: 80 91 09 02 lds r24, 0x0209 ; 0x800209 <ledState>
474: 90 91 0a 02 lds r25, 0x020A ; 0x80020a <ledState+0x1>
478: 89 2b or r24, r25
47a: 09 f0 breq .+2 ; 0x47e <__LOCK_REGION_LENGTH__+0x7e>
47c: 2e c0 rjmp .+92 ; 0x4da <__LOCK_REGION_LENGTH__+0xda>
ledState = HIGH;
47e: b0 92 0a 02 sts 0x020A, r11 ; 0x80020a <ledState+0x1>
482: a0 92 09 02 sts 0x0209, r10 ; 0x800209 <ledState>
486: f6 01 movw r30, r12
488: 84 91 lpm r24, Z
uint8_t bit = digitalPinToBitMask(pin);
48a: fe 01 movw r30, r28
48c: 24 91 lpm r18, Z
uint8_t port = digitalPinToPort(pin);
48e: f8 01 movw r30, r16
490: 94 91 lpm r25, Z
volatile uint8_t *out;
if (port == NOT_A_PIN) return;
492: 99 23 and r25, r25
494: 09 f4 brne .+2 ; 0x498 <__LOCK_REGION_LENGTH__+0x98>
496: 3c c0 rjmp .+120 ; 0x510 <__LOCK_REGION_LENGTH__+0x110>
} else {
ledState = LOW;
}
// set the LED with the ledState of the variable:
digitalWrite(ledPin, ledState);
498: 30 91 09 02 lds r19, 0x0209 ; 0x800209 <ledState>
// If the pin that support PWM output, we need to turn it off
// before doing a digital write.
if (timer != NOT_ON_TIMER) turnOffPWM(timer);
49c: 88 23 and r24, r24
49e: 39 f1 breq .+78 ; 0x4ee <__LOCK_REGION_LENGTH__+0xee>
//
//static inline void turnOffPWM(uint8_t timer) __attribute__ ((always_inline));
//static inline void turnOffPWM(uint8_t timer)
static void turnOffPWM(uint8_t timer)
{
switch (timer)
4a0: 81 50 subi r24, 0x01 ; 1
4a2: 82 31 cpi r24, 0x12 ; 18
4a4: 20 f5 brcc .+72 ; 0x4ee <__LOCK_REGION_LENGTH__+0xee>
4a6: e8 2f mov r30, r24
4a8: f0 e0 ldi r31, 0x00 ; 0
4aa: 88 27 eor r24, r24
4ac: e5 5a subi r30, 0xA5 ; 165
4ae: fd 4f sbci r31, 0xFD ; 253
4b0: 8f 4f sbci r24, 0xFF ; 255
4b2: 0c 94 d4 02 jmp 0x5a8 ; 0x5a8 <__tablejump2__>
4b6: 97 02 muls r25, r23
4b8: 9b 02 muls r25, r27
4ba: 72 02 muls r23, r18
4bc: 8f 02 muls r24, r31
4be: 93 02 muls r25, r19
4c0: 77 02 muls r23, r23
4c2: 9e 02 muls r25, r30
4c4: a4 02 muls r26, r20
4c6: a8 02 muls r26, r24
4c8: ae 02 muls r26, r30
4ca: b2 02 muls r27, r18
4cc: b6 02 muls r27, r22
4ce: bc 02 muls r27, r28
4d0: c0 02 muls r28, r16
4d2: 77 02 muls r23, r23
4d4: c4 02 muls r28, r20
4d6: ca 02 muls r28, r26
4d8: ce 02 muls r28, r30
// if the LED is off turn it on and vice-versa:
if (ledState == LOW) {
ledState = HIGH;
} else {
ledState = LOW;
4da: 10 92 0a 02 sts 0x020A, r1 ; 0x80020a <ledState+0x1>
4de: 10 92 09 02 sts 0x0209, r1 ; 0x800209 <ledState>
4e2: d1 cf rjmp .-94 ; 0x486 <__LOCK_REGION_LENGTH__+0x86>
{
#if defined(TCCR1A) && defined(COM1A1)
case TIMER1A: cbi(TCCR1A, COM1A1); break;
4e4: 80 91 80 00 lds r24, 0x0080 ; 0x800080 <__TEXT_REGION_LENGTH__+0x700080>
4e8: 8f 77 andi r24, 0x7F ; 127
#endif
#if defined(TCCR1A) && defined(COM1B1)
case TIMER1B: cbi(TCCR1A, COM1B1); break;
#endif
#if defined(TCCR1A) && defined(COM1C1)
case TIMER1C: cbi(TCCR1A, COM1C1); break;
4ea: 80 93 80 00 sts 0x0080, r24 ; 0x800080 <__TEXT_REGION_LENGTH__+0x700080>
// If the pin that support PWM output, we need to turn it off
// before doing a digital write.
if (timer != NOT_ON_TIMER) turnOffPWM(timer);
out = portOutputRegister(port);
4ee: e9 2f mov r30, r25
4f0: f0 e0 ldi r31, 0x00 ; 0
4f2: ee 0f add r30, r30
4f4: ff 1f adc r31, r31
4f6: ee 5b subi r30, 0xBE ; 190
4f8: fe 4f sbci r31, 0xFE ; 254
4fa: a5 91 lpm r26, Z+
4fc: b4 91 lpm r27, Z
uint8_t oldSREG = SREG;
4fe: 8f b7 in r24, 0x3f ; 63
cli();
500: f8 94 cli
if (val == LOW) {
*out &= ~bit;
502: 9c 91 ld r25, X
out = portOutputRegister(port);
uint8_t oldSREG = SREG;
cli();
if (val == LOW) {
504: 31 11 cpse r19, r1
506: 4e c0 rjmp .+156 ; 0x5a4 <__LOCK_REGION_LENGTH__+0x1a4>
*out &= ~bit;
508: 20 95 com r18
50a: 29 23 and r18, r25
} else {
*out |= bit;
50c: 2c 93 st X, r18
}
SREG = oldSREG;
50e: 8f bf out 0x3f, r24 ; 63
510: e1 14 cp r14, r1
512: f1 04 cpc r15, r1
514: 09 f4 brne .+2 ; 0x518 <__LOCK_REGION_LENGTH__+0x118>
516: 83 cf rjmp .-250 ; 0x41e <__LOCK_REGION_LENGTH__+0x1e>
518: 0e 94 00 00 call 0 ; 0x0 <__vectors>
51c: 80 cf rjmp .-256 ; 0x41e <__LOCK_REGION_LENGTH__+0x1e>
{
#if defined(TCCR1A) && defined(COM1A1)
case TIMER1A: cbi(TCCR1A, COM1A1); break;
#endif
#if defined(TCCR1A) && defined(COM1B1)
case TIMER1B: cbi(TCCR1A, COM1B1); break;
51e: 80 91 80 00 lds r24, 0x0080 ; 0x800080 <__TEXT_REGION_LENGTH__+0x700080>
522: 8f 7d andi r24, 0xDF ; 223
524: e2 cf rjmp .-60 ; 0x4ea <__LOCK_REGION_LENGTH__+0xea>
#endif
#if defined(TCCR1A) && defined(COM1C1)
case TIMER1C: cbi(TCCR1A, COM1C1); break;
526: 80 91 80 00 lds r24, 0x0080 ; 0x800080 <__TEXT_REGION_LENGTH__+0x700080>
52a: 87 7f andi r24, 0xF7 ; 247
52c: de cf rjmp .-68 ; 0x4ea <__LOCK_REGION_LENGTH__+0xea>
#if defined(TCCR2) && defined(COM21)
case TIMER2: cbi(TCCR2, COM21); break;
#endif
#if defined(TCCR0A) && defined(COM0A1)
case TIMER0A: cbi(TCCR0A, COM0A1); break;
52e: 84 b5 in r24, 0x24 ; 36
530: 8f 77 andi r24, 0x7F ; 127
#endif
#if defined(TCCR0A) && defined(COM0B1)
case TIMER0B: cbi(TCCR0A, COM0B1); break;
532: 84 bd out 0x24, r24 ; 36
534: dc cf rjmp .-72 ; 0x4ee <__LOCK_REGION_LENGTH__+0xee>
536: 84 b5 in r24, 0x24 ; 36
538: 8f 7d andi r24, 0xDF ; 223
53a: fb cf rjmp .-10 ; 0x532 <__LOCK_REGION_LENGTH__+0x132>
#endif
#if defined(TCCR2A) && defined(COM2A1)
case TIMER2A: cbi(TCCR2A, COM2A1); break;
53c: 80 91 b0 00 lds r24, 0x00B0 ; 0x8000b0 <__TEXT_REGION_LENGTH__+0x7000b0>
540: 8f 77 andi r24, 0x7F ; 127
#endif
#if defined(TCCR2A) && defined(COM2B1)
case TIMER2B: cbi(TCCR2A, COM2B1); break;
542: 80 93 b0 00 sts 0x00B0, r24 ; 0x8000b0 <__TEXT_REGION_LENGTH__+0x7000b0>
546: d3 cf rjmp .-90 ; 0x4ee <__LOCK_REGION_LENGTH__+0xee>
548: 80 91 b0 00 lds r24, 0x00B0 ; 0x8000b0 <__TEXT_REGION_LENGTH__+0x7000b0>
54c: 8f 7d andi r24, 0xDF ; 223
54e: f9 cf rjmp .-14 ; 0x542 <__LOCK_REGION_LENGTH__+0x142>
#endif
#if defined(TCCR3A) && defined(COM3A1)
case TIMER3A: cbi(TCCR3A, COM3A1); break;
550: 80 91 90 00 lds r24, 0x0090 ; 0x800090 <__TEXT_REGION_LENGTH__+0x700090>
554: 8f 77 andi r24, 0x7F ; 127
#endif
#if defined(TCCR3A) && defined(COM3B1)
case TIMER3B: cbi(TCCR3A, COM3B1); break;
#endif
#if defined(TCCR3A) && defined(COM3C1)
case TIMER3C: cbi(TCCR3A, COM3C1); break;
556: 80 93 90 00 sts 0x0090, r24 ; 0x800090 <__TEXT_REGION_LENGTH__+0x700090>
55a: c9 cf rjmp .-110 ; 0x4ee <__LOCK_REGION_LENGTH__+0xee>
#if defined(TCCR3A) && defined(COM3A1)
case TIMER3A: cbi(TCCR3A, COM3A1); break;
#endif
#if defined(TCCR3A) && defined(COM3B1)
case TIMER3B: cbi(TCCR3A, COM3B1); break;
55c: 80 91 90 00 lds r24, 0x0090 ; 0x800090 <__TEXT_REGION_LENGTH__+0x700090>
560: 8f 7d andi r24, 0xDF ; 223
562: f9 cf rjmp .-14 ; 0x556 <__LOCK_REGION_LENGTH__+0x156>
#endif
#if defined(TCCR3A) && defined(COM3C1)
case TIMER3C: cbi(TCCR3A, COM3C1); break;
564: 80 91 90 00 lds r24, 0x0090 ; 0x800090 <__TEXT_REGION_LENGTH__+0x700090>
568: 87 7f andi r24, 0xF7 ; 247
56a: f5 cf rjmp .-22 ; 0x556 <__LOCK_REGION_LENGTH__+0x156>
#endif
#if defined(TCCR4A) && defined(COM4A1)
case TIMER4A: cbi(TCCR4A, COM4A1); break;
56c: 80 91 a0 00 lds r24, 0x00A0 ; 0x8000a0 <__TEXT_REGION_LENGTH__+0x7000a0>
570: 8f 77 andi r24, 0x7F ; 127
#endif
#if defined(TCCR4A) && defined(COM4B1)
case TIMER4B: cbi(TCCR4A, COM4B1); break;
#endif
#if defined(TCCR4A) && defined(COM4C1)
case TIMER4C: cbi(TCCR4A, COM4C1); break;
572: 80 93 a0 00 sts 0x00A0, r24 ; 0x8000a0 <__TEXT_REGION_LENGTH__+0x7000a0>
576: bb cf rjmp .-138 ; 0x4ee <__LOCK_REGION_LENGTH__+0xee>
#if defined(TCCR4A) && defined(COM4A1)
case TIMER4A: cbi(TCCR4A, COM4A1); break;
#endif
#if defined(TCCR4A) && defined(COM4B1)
case TIMER4B: cbi(TCCR4A, COM4B1); break;
578: 80 91 a0 00 lds r24, 0x00A0 ; 0x8000a0 <__TEXT_REGION_LENGTH__+0x7000a0>
57c: 8f 7d andi r24, 0xDF ; 223
57e: f9 cf rjmp .-14 ; 0x572 <__LOCK_REGION_LENGTH__+0x172>
#endif
#if defined(TCCR4A) && defined(COM4C1)
case TIMER4C: cbi(TCCR4A, COM4C1); break;
580: 80 91 a0 00 lds r24, 0x00A0 ; 0x8000a0 <__TEXT_REGION_LENGTH__+0x7000a0>
584: 87 7f andi r24, 0xF7 ; 247
586: f5 cf rjmp .-22 ; 0x572 <__LOCK_REGION_LENGTH__+0x172>
#if defined(TCCR4C) && defined(COM4D1)
case TIMER4D: cbi(TCCR4C, COM4D1); break;
#endif
#if defined(TCCR5A)
case TIMER5A: cbi(TCCR5A, COM5A1); break;
588: 80 91 20 01 lds r24, 0x0120 ; 0x800120 <__TEXT_REGION_LENGTH__+0x700120>
58c: 8f 77 andi r24, 0x7F ; 127
case TIMER5B: cbi(TCCR5A, COM5B1); break;
case TIMER5C: cbi(TCCR5A, COM5C1); break;
58e: 80 93 20 01 sts 0x0120, r24 ; 0x800120 <__TEXT_REGION_LENGTH__+0x700120>
592: ad cf rjmp .-166 ; 0x4ee <__LOCK_REGION_LENGTH__+0xee>
case TIMER4D: cbi(TCCR4C, COM4D1); break;
#endif
#if defined(TCCR5A)
case TIMER5A: cbi(TCCR5A, COM5A1); break;
case TIMER5B: cbi(TCCR5A, COM5B1); break;
594: 80 91 20 01 lds r24, 0x0120 ; 0x800120 <__TEXT_REGION_LENGTH__+0x700120>
598: 8f 7d andi r24, 0xDF ; 223
59a: f9 cf rjmp .-14 ; 0x58e <__LOCK_REGION_LENGTH__+0x18e>
case TIMER5C: cbi(TCCR5A, COM5C1); break;
59c: 80 91 20 01 lds r24, 0x0120 ; 0x800120 <__TEXT_REGION_LENGTH__+0x700120>
5a0: 87 7f andi r24, 0xF7 ; 247
5a2: f5 cf rjmp .-22 ; 0x58e <__LOCK_REGION_LENGTH__+0x18e>
cli();
if (val == LOW) {
*out &= ~bit;
} else {
*out |= bit;
5a4: 29 2b or r18, r25
5a6: b2 cf rjmp .-156 ; 0x50c <__LOCK_REGION_LENGTH__+0x10c>
000005a8 <__tablejump2__>:
5a8: ee 0f add r30, r30
5aa: ff 1f adc r31, r31
5ac: 88 1f adc r24, r24
5ae: 8b bf out 0x3b, r24 ; 59
5b0: 07 90 elpm r0, Z+
5b2: f6 91 elpm r31, Z
5b4: e0 2d mov r30, r0
5b6: 19 94 eijmp
000005b8 <_exit>:
5b8: f8 94 cli
000005ba <__stop_program>:
5ba: ff cf rjmp .-2 ; 0x5ba <__stop_program>
NANO
Спойлер
C:\TEMP\arduino_build_452931\BlinkWithoutDelay.ino.elf: file format elf32-avr
Sections:
Idx Name Size VMA LMA File off Algn
0 .data 00000000 00800100 00800100 000003d0 2**0
CONTENTS, ALLOC, LOAD, DATA
1 .text 0000035c 00000000 00000000 00000074 2**1
CONTENTS, ALLOC, LOAD, READONLY, CODE
2 .bss 0000000f 00800100 00800100 000003d0 2**0
ALLOC
3 .comment 00000011 00000000 00000000 000003d0 2**0
CONTENTS, READONLY
4 .note.gnu.avr.deviceinfo 00000040 00000000 00000000 000003e4 2**2
CONTENTS, READONLY
5 .debug_aranges 00000068 00000000 00000000 00000428 2**3
CONTENTS, READONLY, DEBUGGING
6 .debug_info 00000de5 00000000 00000000 00000490 2**0
CONTENTS, READONLY, DEBUGGING
7 .debug_abbrev 000007b8 00000000 00000000 00001275 2**0
CONTENTS, READONLY, DEBUGGING
8 .debug_line 000004cf 00000000 00000000 00001a2d 2**0
CONTENTS, READONLY, DEBUGGING
9 .debug_frame 0000005c 00000000 00000000 00001efc 2**2
CONTENTS, READONLY, DEBUGGING
10 .debug_str 00000492 00000000 00000000 00001f58 2**0
CONTENTS, READONLY, DEBUGGING
11 .debug_loc 0000042f 00000000 00000000 000023ea 2**0
CONTENTS, READONLY, DEBUGGING
12 .debug_ranges 000000b0 00000000 00000000 00002819 2**0
CONTENTS, READONLY, DEBUGGING
Disassembly of section .text:
00000000 <__vectors>:
0: 0c 94 5c 00 jmp 0xb8 ; 0xb8 <__ctors_end>
4: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
8: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
c: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
10: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
14: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
18: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
1c: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
20: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
24: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
28: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
2c: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
30: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
34: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
38: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
3c: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
40: 0c 94 70 00 jmp 0xe0 ; 0xe0 <__vector_16>
44: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
48: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
4c: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
50: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
54: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
58: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
5c: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
60: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
64: 0c 94 6e 00 jmp 0xdc ; 0xdc <__bad_interrupt>
00000068 <__trampolines_end>:
68: 00 00 nop
6a: 00 00 nop
6c: 24 00 .word 0x0024 ; ????
6e: 27 00 .word 0x0027 ; ????
70: 2a 00 .word 0x002a ; ????
00000072 <port_to_output_PGM>:
72: 00 00 00 00 25 00 28 00 2b 00 ....%.(.+.
0000007c <digital_pin_to_port_PGM>:
7c: 04 04 04 04 04 04 04 04 02 02 02 02 02 02 03 03 ................
8c: 03 03 03 03 ....
00000090 <digital_pin_to_bit_mask_PGM>:
90: 01 02 04 08 10 20 40 80 01 02 04 08 10 20 01 02 ..... @...... ..
a0: 04 08 10 20 ...
000000a4 <digital_pin_to_timer_PGM>:
a4: 00 00 00 08 00 02 01 00 00 03 04 07 00 00 00 00 ................
b4: 00 00 00 00 ....
000000b8 <__ctors_end>:
b8: 11 24 eor r1, r1
ba: 1f be out 0x3f, r1 ; 63
bc: cf ef ldi r28, 0xFF ; 255
be: d8 e0 ldi r29, 0x08 ; 8
c0: de bf out 0x3e, r29 ; 62
c2: cd bf out 0x3d, r28 ; 61
000000c4 <__do_clear_bss>:
c4: 21 e0 ldi r18, 0x01 ; 1
c6: a0 e0 ldi r26, 0x00 ; 0
c8: b1 e0 ldi r27, 0x01 ; 1
ca: 01 c0 rjmp .+2 ; 0xce <.do_clear_bss_start>
000000cc <.do_clear_bss_loop>:
cc: 1d 92 st X+, r1
000000ce <.do_clear_bss_start>:
ce: af 30 cpi r26, 0x0F ; 15
d0: b2 07 cpc r27, r18
d2: e1 f7 brne .-8 ; 0xcc <.do_clear_bss_loop>
d4: 0e 94 ba 00 call 0x174 ; 0x174 <main>
d8: 0c 94 ac 01 jmp 0x358 ; 0x358 <_exit>
000000dc <__bad_interrupt>:
dc: 0c 94 00 00 jmp 0 ; 0x0 <__vectors>
000000e0 <__vector_16>:
#if defined(TIM0_OVF_vect)
ISR(TIM0_OVF_vect)
#else
ISR(TIMER0_OVF_vect)
#endif
{
e0: 1f 92 push r1
e2: 0f 92 push r0
e4: 0f b6 in r0, 0x3f ; 63
e6: 0f 92 push r0
e8: 11 24 eor r1, r1
ea: 2f 93 push r18
ec: 3f 93 push r19
ee: 8f 93 push r24
f0: 9f 93 push r25
f2: af 93 push r26
f4: bf 93 push r27
// copy these to local variables so they can be stored in registers
// (volatile variables must be read from memory on every access)
unsigned long m = timer0_millis;
f6: 80 91 05 01 lds r24, 0x0105 ; 0x800105 <timer0_millis>
fa: 90 91 06 01 lds r25, 0x0106 ; 0x800106 <timer0_millis+0x1>
fe: a0 91 07 01 lds r26, 0x0107 ; 0x800107 <timer0_millis+0x2>
102: b0 91 08 01 lds r27, 0x0108 ; 0x800108 <timer0_millis+0x3>
unsigned char f = timer0_fract;
106: 30 91 04 01 lds r19, 0x0104 ; 0x800104 <timer0_fract>
m += MILLIS_INC;
f += FRACT_INC;
10a: 23 e0 ldi r18, 0x03 ; 3
10c: 23 0f add r18, r19
if (f >= FRACT_MAX) {
10e: 2d 37 cpi r18, 0x7D ; 125
110: 58 f5 brcc .+86 ; 0x168 <__vector_16+0x88>
// copy these to local variables so they can be stored in registers
// (volatile variables must be read from memory on every access)
unsigned long m = timer0_millis;
unsigned char f = timer0_fract;
m += MILLIS_INC;
112: 01 96 adiw r24, 0x01 ; 1
114: a1 1d adc r26, r1
116: b1 1d adc r27, r1
if (f >= FRACT_MAX) {
f -= FRACT_MAX;
m += 1;
}
timer0_fract = f;
118: 20 93 04 01 sts 0x0104, r18 ; 0x800104 <timer0_fract>
timer0_millis = m;
11c: 80 93 05 01 sts 0x0105, r24 ; 0x800105 <timer0_millis>
120: 90 93 06 01 sts 0x0106, r25 ; 0x800106 <timer0_millis+0x1>
124: a0 93 07 01 sts 0x0107, r26 ; 0x800107 <timer0_millis+0x2>
128: b0 93 08 01 sts 0x0108, r27 ; 0x800108 <timer0_millis+0x3>
timer0_overflow_count++;
12c: 80 91 00 01 lds r24, 0x0100 ; 0x800100 <_edata>
130: 90 91 01 01 lds r25, 0x0101 ; 0x800101 <_edata+0x1>
134: a0 91 02 01 lds r26, 0x0102 ; 0x800102 <_edata+0x2>
138: b0 91 03 01 lds r27, 0x0103 ; 0x800103 <_edata+0x3>
13c: 01 96 adiw r24, 0x01 ; 1
13e: a1 1d adc r26, r1
140: b1 1d adc r27, r1
142: 80 93 00 01 sts 0x0100, r24 ; 0x800100 <_edata>
146: 90 93 01 01 sts 0x0101, r25 ; 0x800101 <_edata+0x1>
14a: a0 93 02 01 sts 0x0102, r26 ; 0x800102 <_edata+0x2>
14e: b0 93 03 01 sts 0x0103, r27 ; 0x800103 <_edata+0x3>
}
152: bf 91 pop r27
154: af 91 pop r26
156: 9f 91 pop r25
158: 8f 91 pop r24
15a: 3f 91 pop r19
15c: 2f 91 pop r18
15e: 0f 90 pop r0
160: 0f be out 0x3f, r0 ; 63
162: 0f 90 pop r0
164: 1f 90 pop r1
166: 18 95 reti
unsigned char f = timer0_fract;
m += MILLIS_INC;
f += FRACT_INC;
if (f >= FRACT_MAX) {
f -= FRACT_MAX;
168: 26 e8 ldi r18, 0x86 ; 134
16a: 23 0f add r18, r19
m += 1;
16c: 02 96 adiw r24, 0x02 ; 2
16e: a1 1d adc r26, r1
170: b1 1d adc r27, r1
172: d2 cf rjmp .-92 ; 0x118 <__vector_16+0x38>
00000174 <main>:
void init()
{
// this needs to be called before setup() or some functions won't
// work there
sei();
174: 78 94 sei
// on the ATmega168, timer 0 is also used for fast hardware pwm
// (using phase-correct PWM would mean that timer 0 overflowed half as often
// resulting in different millis() behavior on the ATmega8 and ATmega168)
#if defined(TCCR0A) && defined(WGM01)
sbi(TCCR0A, WGM01);
176: 84 b5 in r24, 0x24 ; 36
178: 82 60 ori r24, 0x02 ; 2
17a: 84 bd out 0x24, r24 ; 36
sbi(TCCR0A, WGM00);
17c: 84 b5 in r24, 0x24 ; 36
17e: 81 60 ori r24, 0x01 ; 1
180: 84 bd out 0x24, r24 ; 36
// this combination is for the standard atmega8
sbi(TCCR0, CS01);
sbi(TCCR0, CS00);
#elif defined(TCCR0B) && defined(CS01) && defined(CS00)
// this combination is for the standard 168/328/1280/2560
sbi(TCCR0B, CS01);
182: 85 b5 in r24, 0x25 ; 37
184: 82 60 ori r24, 0x02 ; 2
186: 85 bd out 0x25, r24 ; 37
sbi(TCCR0B, CS00);
188: 85 b5 in r24, 0x25 ; 37
18a: 81 60 ori r24, 0x01 ; 1
18c: 85 bd out 0x25, r24 ; 37
// enable timer 0 overflow interrupt
#if defined(TIMSK) && defined(TOIE0)
sbi(TIMSK, TOIE0);
#elif defined(TIMSK0) && defined(TOIE0)
sbi(TIMSK0, TOIE0);
18e: 80 91 6e 00 lds r24, 0x006E ; 0x80006e <__DATA_REGION_ORIGIN__+0xe>
192: 81 60 ori r24, 0x01 ; 1
194: 80 93 6e 00 sts 0x006E, r24 ; 0x80006e <__DATA_REGION_ORIGIN__+0xe>
// this is better for motors as it ensures an even waveform
// note, however, that fast pwm mode can achieve a frequency of up
// 8 MHz (with a 16 MHz clock) at 50% duty cycle
#if defined(TCCR1B) && defined(CS11) && defined(CS10)
TCCR1B = 0;
198: 10 92 81 00 sts 0x0081, r1 ; 0x800081 <__DATA_REGION_ORIGIN__+0x21>
// set timer 1 prescale factor to 64
sbi(TCCR1B, CS11);
19c: 80 91 81 00 lds r24, 0x0081 ; 0x800081 <__DATA_REGION_ORIGIN__+0x21>
1a0: 82 60 ori r24, 0x02 ; 2
1a2: 80 93 81 00 sts 0x0081, r24 ; 0x800081 <__DATA_REGION_ORIGIN__+0x21>
#if F_CPU >= 8000000L
sbi(TCCR1B, CS10);
1a6: 80 91 81 00 lds r24, 0x0081 ; 0x800081 <__DATA_REGION_ORIGIN__+0x21>
1aa: 81 60 ori r24, 0x01 ; 1
1ac: 80 93 81 00 sts 0x0081, r24 ; 0x800081 <__DATA_REGION_ORIGIN__+0x21>
sbi(TCCR1, CS10);
#endif
#endif
// put timer 1 in 8-bit phase correct pwm mode
#if defined(TCCR1A) && defined(WGM10)
sbi(TCCR1A, WGM10);
1b0: 80 91 80 00 lds r24, 0x0080 ; 0x800080 <__DATA_REGION_ORIGIN__+0x20>
1b4: 81 60 ori r24, 0x01 ; 1
1b6: 80 93 80 00 sts 0x0080, r24 ; 0x800080 <__DATA_REGION_ORIGIN__+0x20>
// set timer 2 prescale factor to 64
#if defined(TCCR2) && defined(CS22)
sbi(TCCR2, CS22);
#elif defined(TCCR2B) && defined(CS22)
sbi(TCCR2B, CS22);
1ba: 80 91 b1 00 lds r24, 0x00B1 ; 0x8000b1 <__DATA_REGION_ORIGIN__+0x51>
1be: 84 60 ori r24, 0x04 ; 4
1c0: 80 93 b1 00 sts 0x00B1, r24 ; 0x8000b1 <__DATA_REGION_ORIGIN__+0x51>
// configure timer 2 for phase correct pwm (8-bit)
#if defined(TCCR2) && defined(WGM20)
sbi(TCCR2, WGM20);
#elif defined(TCCR2A) && defined(WGM20)
sbi(TCCR2A, WGM20);
1c4: 80 91 b0 00 lds r24, 0x00B0 ; 0x8000b0 <__DATA_REGION_ORIGIN__+0x50>
1c8: 81 60 ori r24, 0x01 ; 1
1ca: 80 93 b0 00 sts 0x00B0, r24 ; 0x8000b0 <__DATA_REGION_ORIGIN__+0x50>
#endif
#if defined(ADCSRA)
// set a2d prescaler so we are inside the desired 50-200 KHz range.
#if F_CPU >= 16000000 // 16 MHz / 128 = 125 KHz
sbi(ADCSRA, ADPS2);
1ce: 80 91 7a 00 lds r24, 0x007A ; 0x80007a <__DATA_REGION_ORIGIN__+0x1a>
1d2: 84 60 ori r24, 0x04 ; 4
1d4: 80 93 7a 00 sts 0x007A, r24 ; 0x80007a <__DATA_REGION_ORIGIN__+0x1a>
sbi(ADCSRA, ADPS1);
1d8: 80 91 7a 00 lds r24, 0x007A ; 0x80007a <__DATA_REGION_ORIGIN__+0x1a>
1dc: 82 60 ori r24, 0x02 ; 2
1de: 80 93 7a 00 sts 0x007A, r24 ; 0x80007a <__DATA_REGION_ORIGIN__+0x1a>
sbi(ADCSRA, ADPS0);
1e2: 80 91 7a 00 lds r24, 0x007A ; 0x80007a <__DATA_REGION_ORIGIN__+0x1a>
1e6: 81 60 ori r24, 0x01 ; 1
1e8: 80 93 7a 00 sts 0x007A, r24 ; 0x80007a <__DATA_REGION_ORIGIN__+0x1a>
cbi(ADCSRA, ADPS2);
cbi(ADCSRA, ADPS1);
sbi(ADCSRA, ADPS0);
#endif
// enable a2d conversions
sbi(ADCSRA, ADEN);
1ec: 80 91 7a 00 lds r24, 0x007A ; 0x80007a <__DATA_REGION_ORIGIN__+0x1a>
1f0: 80 68 ori r24, 0x80 ; 128
1f2: 80 93 7a 00 sts 0x007A, r24 ; 0x80007a <__DATA_REGION_ORIGIN__+0x1a>
// here so they can be used as normal digital i/o; they will be
// reconnected in Serial.begin()
#if defined(UCSRB)
UCSRB = 0;
#elif defined(UCSR0B)
UCSR0B = 0;
1f6: 10 92 c1 00 sts 0x00C1, r1 ; 0x8000c1 <__DATA_REGION_ORIGIN__+0x61>
#include "wiring_private.h"
#include "pins_arduino.h"
void pinMode(uint8_t pin, uint8_t mode)
{
uint8_t bit = digitalPinToBitMask(pin);
1fa: cd e9 ldi r28, 0x9D ; 157
1fc: d0 e0 ldi r29, 0x00 ; 0
1fe: fe 01 movw r30, r28
200: 24 91 lpm r18, Z
uint8_t port = digitalPinToPort(pin);
202: 09 e8 ldi r16, 0x89 ; 137
204: 10 e0 ldi r17, 0x00 ; 0
206: f8 01 movw r30, r16
208: 84 91 lpm r24, Z
volatile uint8_t *reg, *out;
if (port == NOT_A_PIN) return;
20a: 88 23 and r24, r24
20c: 99 f0 breq .+38 ; 0x234 <main+0xc0>
// JWS: can I let the optimizer do this?
reg = portModeRegister(port);
20e: 90 e0 ldi r25, 0x00 ; 0
210: 88 0f add r24, r24
212: 99 1f adc r25, r25
214: fc 01 movw r30, r24
216: e8 59 subi r30, 0x98 ; 152
218: ff 4f sbci r31, 0xFF ; 255
21a: a5 91 lpm r26, Z+
21c: b4 91 lpm r27, Z
out = portOutputRegister(port);
21e: fc 01 movw r30, r24
220: ee 58 subi r30, 0x8E ; 142
222: ff 4f sbci r31, 0xFF ; 255
224: 85 91 lpm r24, Z+
226: 94 91 lpm r25, Z
cli();
*reg &= ~bit;
*out |= bit;
SREG = oldSREG;
} else {
uint8_t oldSREG = SREG;
228: 8f b7 in r24, 0x3f ; 63
cli();
22a: f8 94 cli
*reg |= bit;
22c: 9c 91 ld r25, X
22e: 29 2b or r18, r25
230: 2c 93 st X, r18
SREG = oldSREG;
232: 8f bf out 0x3f, r24 ; 63
}
}
void digitalWrite(uint8_t pin, uint8_t val)
{
uint8_t timer = digitalPinToTimer(pin);
234: 21 eb ldi r18, 0xB1 ; 177
236: c2 2e mov r12, r18
238: 20 e0 ldi r18, 0x00 ; 0
23a: d2 2e mov r13, r18
setup();
for (;;) {
loop();
if (serialEventRun) serialEventRun();
23c: 30 e0 ldi r19, 0x00 ; 0
23e: e3 2e mov r14, r19
240: 30 e0 ldi r19, 0x00 ; 0
242: f3 2e mov r15, r19
// save the last time you blinked the LED
previousMillis = currentMillis;
// if the LED is off turn it on and vice-versa:
if (ledState == LOW) {
ledState = HIGH;
244: aa 24 eor r10, r10
246: a3 94 inc r10
248: b1 2c mov r11, r1
}
unsigned long millis()
{
unsigned long m;
uint8_t oldSREG = SREG;
24a: 2f b7 in r18, 0x3f ; 63
// disable interrupts while we read timer0_millis or we might get an
// inconsistent value (e.g. in the middle of a write to timer0_millis)
cli();
24c: f8 94 cli
m = timer0_millis;
24e: 80 91 05 01 lds r24, 0x0105 ; 0x800105 <timer0_millis>
252: 90 91 06 01 lds r25, 0x0106 ; 0x800106 <timer0_millis+0x1>
256: a0 91 07 01 lds r26, 0x0107 ; 0x800107 <timer0_millis+0x2>
25a: b0 91 08 01 lds r27, 0x0108 ; 0x800108 <timer0_millis+0x3>
SREG = oldSREG;
25e: 2f bf out 0x3f, r18 ; 63
// check to see if it's time to blink the LED; that is, if the difference
// between the current time and last time you blinked the LED is bigger than
// the interval at which you want to blink the LED.
unsigned long currentMillis = millis();
if (currentMillis - previousMillis >= interval) {
260: 40 91 0b 01 lds r20, 0x010B ; 0x80010b <previousMillis>
264: 50 91 0c 01 lds r21, 0x010C ; 0x80010c <previousMillis+0x1>
268: 60 91 0d 01 lds r22, 0x010D ; 0x80010d <previousMillis+0x2>
26c: 70 91 0e 01 lds r23, 0x010E ; 0x80010e <previousMillis+0x3>
270: 3c 01 movw r6, r24
272: 4d 01 movw r8, r26
274: 64 1a sub r6, r20
276: 75 0a sbc r7, r21
278: 86 0a sbc r8, r22
27a: 97 0a sbc r9, r23
27c: b4 01 movw r22, r8
27e: a3 01 movw r20, r6
280: 48 3e cpi r20, 0xE8 ; 232
282: 53 40 sbci r21, 0x03 ; 3
284: 61 05 cpc r22, r1
286: 71 05 cpc r23, r1
288: 08 f4 brcc .+2 ; 0x28c <main+0x118>
28a: 36 c0 rjmp .+108 ; 0x2f8 <main+0x184>
// save the last time you blinked the LED
previousMillis = currentMillis;
28c: 80 93 0b 01 sts 0x010B, r24 ; 0x80010b <previousMillis>
290: 90 93 0c 01 sts 0x010C, r25 ; 0x80010c <previousMillis+0x1>
294: a0 93 0d 01 sts 0x010D, r26 ; 0x80010d <previousMillis+0x2>
298: b0 93 0e 01 sts 0x010E, r27 ; 0x80010e <previousMillis+0x3>
// if the LED is off turn it on and vice-versa:
if (ledState == LOW) {
29c: 80 91 09 01 lds r24, 0x0109 ; 0x800109 <ledState>
2a0: 90 91 0a 01 lds r25, 0x010A ; 0x80010a <ledState+0x1>
2a4: 89 2b or r24, r25
2a6: 79 f5 brne .+94 ; 0x306 <main+0x192>
ledState = HIGH;
2a8: b0 92 0a 01 sts 0x010A, r11 ; 0x80010a <ledState+0x1>
2ac: a0 92 09 01 sts 0x0109, r10 ; 0x800109 <ledState>
2b0: f6 01 movw r30, r12
2b2: 94 91 lpm r25, Z
uint8_t bit = digitalPinToBitMask(pin);
2b4: fe 01 movw r30, r28
2b6: 84 91 lpm r24, Z
uint8_t port = digitalPinToPort(pin);
2b8: f8 01 movw r30, r16
2ba: 34 91 lpm r19, Z
volatile uint8_t *out;
if (port == NOT_A_PIN) return;
2bc: 33 23 and r19, r19
2be: e1 f0 breq .+56 ; 0x2f8 <main+0x184>
} else {
ledState = LOW;
}
// set the LED with the ledState of the variable:
digitalWrite(ledPin, ledState);
2c0: 20 91 09 01 lds r18, 0x0109 ; 0x800109 <ledState>
// If the pin that support PWM output, we need to turn it off
// before doing a digital write.
if (timer != NOT_ON_TIMER) turnOffPWM(timer);
2c4: 99 23 and r25, r25
2c6: 39 f0 breq .+14 ; 0x2d6 <main+0x162>
//
//static inline void turnOffPWM(uint8_t timer) __attribute__ ((always_inline));
//static inline void turnOffPWM(uint8_t timer)
static void turnOffPWM(uint8_t timer)
{
switch (timer)
2c8: 93 30 cpi r25, 0x03 ; 3
2ca: 61 f1 breq .+88 ; 0x324 <main+0x1b0>
2cc: 08 f5 brcc .+66 ; 0x310 <main+0x19c>
2ce: 91 30 cpi r25, 0x01 ; 1
2d0: 79 f1 breq .+94 ; 0x330 <main+0x1bc>
2d2: 92 30 cpi r25, 0x02 ; 2
2d4: 89 f1 breq .+98 ; 0x338 <main+0x1c4>
// If the pin that support PWM output, we need to turn it off
// before doing a digital write.
if (timer != NOT_ON_TIMER) turnOffPWM(timer);
out = portOutputRegister(port);
2d6: e3 2f mov r30, r19
2d8: f0 e0 ldi r31, 0x00 ; 0
2da: ee 0f add r30, r30
2dc: ff 1f adc r31, r31
2de: ee 58 subi r30, 0x8E ; 142
2e0: ff 4f sbci r31, 0xFF ; 255
2e2: a5 91 lpm r26, Z+
2e4: b4 91 lpm r27, Z
uint8_t oldSREG = SREG;
2e6: 9f b7 in r25, 0x3f ; 63
cli();
2e8: f8 94 cli
if (val == LOW) {
2ea: 21 11 cpse r18, r1
2ec: 32 c0 rjmp .+100 ; 0x352 <main+0x1de>
*out &= ~bit;
2ee: 2c 91 ld r18, X
2f0: 80 95 com r24
2f2: 82 23 and r24, r18
} else {
*out |= bit;
2f4: 8c 93 st X, r24
}
SREG = oldSREG;
2f6: 9f bf out 0x3f, r25 ; 63
2f8: e1 14 cp r14, r1
2fa: f1 04 cpc r15, r1
2fc: 09 f4 brne .+2 ; 0x300 <main+0x18c>
2fe: a5 cf rjmp .-182 ; 0x24a <main+0xd6>
300: 0e 94 00 00 call 0 ; 0x0 <__vectors>
304: a2 cf rjmp .-188 ; 0x24a <main+0xd6>
// if the LED is off turn it on and vice-versa:
if (ledState == LOW) {
ledState = HIGH;
} else {
ledState = LOW;
306: 10 92 0a 01 sts 0x010A, r1 ; 0x80010a <ledState+0x1>
30a: 10 92 09 01 sts 0x0109, r1 ; 0x800109 <ledState>
30e: d0 cf rjmp .-96 ; 0x2b0 <main+0x13c>
//
//static inline void turnOffPWM(uint8_t timer) __attribute__ ((always_inline));
//static inline void turnOffPWM(uint8_t timer)
static void turnOffPWM(uint8_t timer)
{
switch (timer)
310: 97 30 cpi r25, 0x07 ; 7
312: a9 f0 breq .+42 ; 0x33e <main+0x1ca>
314: 98 30 cpi r25, 0x08 ; 8
316: c9 f0 breq .+50 ; 0x34a <main+0x1d6>
318: 94 30 cpi r25, 0x04 ; 4
31a: e9 f6 brne .-70 ; 0x2d6 <main+0x162>
{
#if defined(TCCR1A) && defined(COM1A1)
case TIMER1A: cbi(TCCR1A, COM1A1); break;
#endif
#if defined(TCCR1A) && defined(COM1B1)
case TIMER1B: cbi(TCCR1A, COM1B1); break;
31c: 90 91 80 00 lds r25, 0x0080 ; 0x800080 <__DATA_REGION_ORIGIN__+0x20>
320: 9f 7d andi r25, 0xDF ; 223
322: 03 c0 rjmp .+6 ; 0x32a <main+0x1b6>
static void turnOffPWM(uint8_t timer)
{
switch (timer)
{
#if defined(TCCR1A) && defined(COM1A1)
case TIMER1A: cbi(TCCR1A, COM1A1); break;
324: 90 91 80 00 lds r25, 0x0080 ; 0x800080 <__DATA_REGION_ORIGIN__+0x20>
328: 9f 77 andi r25, 0x7F ; 127
#endif
#if defined(TCCR1A) && defined(COM1B1)
case TIMER1B: cbi(TCCR1A, COM1B1); break;
32a: 90 93 80 00 sts 0x0080, r25 ; 0x800080 <__DATA_REGION_ORIGIN__+0x20>
32e: d3 cf rjmp .-90 ; 0x2d6 <main+0x162>
#if defined(TCCR2) && defined(COM21)
case TIMER2: cbi(TCCR2, COM21); break;
#endif
#if defined(TCCR0A) && defined(COM0A1)
case TIMER0A: cbi(TCCR0A, COM0A1); break;
330: 94 b5 in r25, 0x24 ; 36
332: 9f 77 andi r25, 0x7F ; 127
#endif
#if defined(TCCR0A) && defined(COM0B1)
case TIMER0B: cbi(TCCR0A, COM0B1); break;
334: 94 bd out 0x24, r25 ; 36
336: cf cf rjmp .-98 ; 0x2d6 <main+0x162>
338: 94 b5 in r25, 0x24 ; 36
33a: 9f 7d andi r25, 0xDF ; 223
33c: fb cf rjmp .-10 ; 0x334 <main+0x1c0>
#endif
#if defined(TCCR2A) && defined(COM2A1)
case TIMER2A: cbi(TCCR2A, COM2A1); break;
33e: 90 91 b0 00 lds r25, 0x00B0 ; 0x8000b0 <__DATA_REGION_ORIGIN__+0x50>
342: 9f 77 andi r25, 0x7F ; 127
#endif
#if defined(TCCR2A) && defined(COM2B1)
case TIMER2B: cbi(TCCR2A, COM2B1); break;
344: 90 93 b0 00 sts 0x00B0, r25 ; 0x8000b0 <__DATA_REGION_ORIGIN__+0x50>
348: c6 cf rjmp .-116 ; 0x2d6 <main+0x162>
34a: 90 91 b0 00 lds r25, 0x00B0 ; 0x8000b0 <__DATA_REGION_ORIGIN__+0x50>
34e: 9f 7d andi r25, 0xDF ; 223
350: f9 cf rjmp .-14 ; 0x344 <main+0x1d0>
cli();
if (val == LOW) {
*out &= ~bit;
} else {
*out |= bit;
352: 2c 91 ld r18, X
354: 82 2b or r24, r18
356: ce cf rjmp .-100 ; 0x2f4 <main+0x180>
00000358 <_exit>:
358: f8 94 cli
0000035a <__stop_program>:
35a: ff cf rjmp .-2 ; 0x35a <__stop_program>
Докладываю, эта хрень с атмегой получается только при программировании через программатор USBasp, при программировании через сделанный на коленке на чёрной изоленте из ардуино nano Arduino as ISP всё заливается и работает нормально…
логи загрузки еже что )))
Спойлер
Скетч использует 1468 байт (0%) памяти устройства. Всего доступно 253952 байт.
Глобальные переменные используют 15 байт (0%) динамической памяти, оставляя 8177 байт для локальных переменных. Максимум: 8192 байт.
E:\arduino-WKD\portable\packages\arduino\tools\avrdude\6.3.0-arduino17/bin/avrdude -CE:\arduino-WKD\portable\packages\arduino\tools\avrdude\6.3.0-arduino17/etc/avrdude.conf -v -patmega2560 -cusbasp -Pusb -Uflash:w:C:\Temp\arduino_build_353758/BlinkWithoutDelay.ino.hex:i
avrdude: Version 6.3-20190619
Copyright (c) 2000-2005 Brian Dean, http://www.bdmicro.com/
Copyright (c) 2007-2014 Joerg Wunsch
System wide configuration file is "E:\arduino-WKD\portable\packages\arduino\tools\avrdude\6.3.0-arduino17/etc/avrdude.conf"
Using Port : usb
Using Programmer : usbasp
AVR Part : ATmega2560
Chip Erase delay : 9000 us
PAGEL : PD7
BS2 : PA0
RESET disposition : dedicated
RETRY pulse : SCK
serial program mode : yes
parallel program mode : yes
Timeout : 200
StabDelay : 100
CmdexeDelay : 25
SyncLoops : 32
ByteDelay : 0
PollIndex : 3
PollValue : 0x53
Memory Detail :
Block Poll Page Polled
Memory Type Mode Delay Size Indx Paged Size Size #Pages MinW MaxW ReadBack
----------- ---- ----- ----- ---- ------ ------ ---- ------ ----- ----- ---------
eeprom 65 10 8 0 no 4096 8 0 9000 9000 0x00 0x00
flash 65 10 256 0 yes 262144 256 1024 4500 4500 0x00 0x00
lfuse 0 0 0 0 no 1 0 0 9000 9000 0x00 0x00
hfuse 0 0 0 0 no 1 0 0 9000 9000 0x00 0x00
efuse 0 0 0 0 no 1 0 0 9000 9000 0x00 0x00
lock 0 0 0 0 no 1 0 0 9000 9000 0x00 0x00
calibration 0 0 0 0 no 1 0 0 0 0 0x00 0x00
signature 0 0 0 0 no 3 0 0 0 0 0x00 0x00
Programmer Type : usbasp
Description : USBasp, http://www.fischl.de/usbasp/
avrdude: auto set sck period (because given equals null)
avrdude: AVR device initialized and ready to accept instructions
Reading | ################################################## | 100% 0.00s
avrdude: Device signature = 0x1e9801 (probably m2560)
avrdude: NOTE: "flash" memory has been specified, an erase cycle will be performed
To disable this feature, specify the -D option.
avrdude: erasing chip
avrdude: auto set sck period (because given equals null)
avrdude: reading input file "C:\Temp\arduino_build_353758/BlinkWithoutDelay.ino.hex"
avrdude: writing flash (1468 bytes):
Writing | ################################################## | 100% 0.73s
avrdude: 1468 bytes of flash written
avrdude: verifying flash memory against C:\Temp\arduino_build_353758/BlinkWithoutDelay.ino.hex:
avrdude: load data flash data from input file C:\Temp\arduino_build_353758/BlinkWithoutDelay.ino.hex:
avrdude: input file C:\Temp\arduino_build_353758/BlinkWithoutDelay.ino.hex contains 1468 bytes
avrdude: reading on-chip flash data:
Reading | ################################################## | 100% 0.40s
avrdude: verifying ...
avrdude: 1468 bytes of flash verified
avrdude done. Thank you.
Спойлер
Скетч использует 1468 байт (0%) памяти устройства. Всего доступно 253952 байт.
Глобальные переменные используют 15 байт (0%) динамической памяти, оставляя 8177 байт для локальных переменных. Максимум: 8192 байт.
E:\arduino-WKD\portable\packages\arduino\tools\avrdude\6.3.0-arduino17/bin/avrdude -CE:\arduino-WKD\portable\packages\arduino\tools\avrdude\6.3.0-arduino17/etc/avrdude.conf -v -patmega2560 -cstk500v1 -PCOM2 -b19200 -Uflash:w:C:\Temp\arduino_build_353758/BlinkWithoutDelay.ino.hex:i
avrdude: Version 6.3-20190619
Copyright (c) 2000-2005 Brian Dean, http://www.bdmicro.com/
Copyright (c) 2007-2014 Joerg Wunsch
System wide configuration file is "E:\arduino-WKD\portable\packages\arduino\tools\avrdude\6.3.0-arduino17/etc/avrdude.conf"
Using Port : COM2
Using Programmer : stk500v1
Overriding Baud Rate : 19200
AVR Part : ATmega2560
Chip Erase delay : 9000 us
PAGEL : PD7
BS2 : PA0
RESET disposition : dedicated
RETRY pulse : SCK
serial program mode : yes
parallel program mode : yes
Timeout : 200
StabDelay : 100
CmdexeDelay : 25
SyncLoops : 32
ByteDelay : 0
PollIndex : 3
PollValue : 0x53
Memory Detail :
Block Poll Page Polled
Memory Type Mode Delay Size Indx Paged Size Size #Pages MinW MaxW ReadBack
----------- ---- ----- ----- ---- ------ ------ ---- ------ ----- ----- ---------
eeprom 65 10 8 0 no 4096 8 0 9000 9000 0x00 0x00
flash 65 10 256 0 yes 262144 256 1024 4500 4500 0x00 0x00
lfuse 0 0 0 0 no 1 0 0 9000 9000 0x00 0x00
hfuse 0 0 0 0 no 1 0 0 9000 9000 0x00 0x00
efuse 0 0 0 0 no 1 0 0 9000 9000 0x00 0x00
lock 0 0 0 0 no 1 0 0 9000 9000 0x00 0x00
calibration 0 0 0 0 no 1 0 0 0 0 0x00 0x00
signature 0 0 0 0 no 3 0 0 0 0 0x00 0x00
Programmer Type : STK500
Description : Atmel STK500 Version 1.x firmware
Hardware Version: 2
Firmware Version: 1.18
Topcard : Unknown
Vtarget : 0.0 V
Varef : 0.0 V
Oscillator : Off
SCK period : 0.1 us
avrdude: AVR device initialized and ready to accept instructions
Reading | ################################################## | 100% 0.02s
avrdude: Device signature = 0x1e9801 (probably m2560)
avrdude: NOTE: "flash" memory has been specified, an erase cycle will be performed
To disable this feature, specify the -D option.
avrdude: erasing chip
avrdude: reading input file "C:\Temp\arduino_build_353758/BlinkWithoutDelay.ino.hex"
avrdude: writing flash (1468 bytes):
Writing | ################################################## | 100% 1.46s
avrdude: 1468 bytes of flash written
avrdude: verifying flash memory against C:\Temp\arduino_build_353758/BlinkWithoutDelay.ino.hex:
avrdude: load data flash data from input file C:\Temp\arduino_build_353758/BlinkWithoutDelay.ino.hex:
avrdude: input file C:\Temp\arduino_build_353758/BlinkWithoutDelay.ino.hex contains 1468 bytes
avrdude: reading on-chip flash data:
Reading | ################################################## | 100% 0.86s
avrdude: verifying ...
avrdude: 1468 bytes of flash verified
avrdude done. Thank you.
Прошивку обновлял в нем?
нет, не обновлял
Попробуй последнюю залить.
пока не вижу смысла, надо понять в чём прикол, беру USBasp из программы AVRDUDES 2.17 лью HEX без загрузчика - не работает, лью HEX c загрузчиком - работает
Бодается 2560?
И что тут неправильного?
надо понять где косяки:
По прядку:
Arduino AS ISP (блинк работает)
Загрузили загрузчик, фьюзы:
L - 0xFF
H - 0xD8
E - 0xFD
LB - 0xCF
Прошиваем Блинк, фьюзы:
L - 0xFF
H - 0xD8
E - 0xFD
LB - 0xFF
USBasp (блинк не работает)
Загрузили загрузчик, фьюзы:
L - 0xFF
H - 0xD8
E - 0xFD
LB - 0xCF
Прошиваем Блинк, фьюзы:
L - 0xFF
H - 0xD8
E - 0xFD
LB - 0xFF
В “Прошиваем Блинк, фьюзы:”
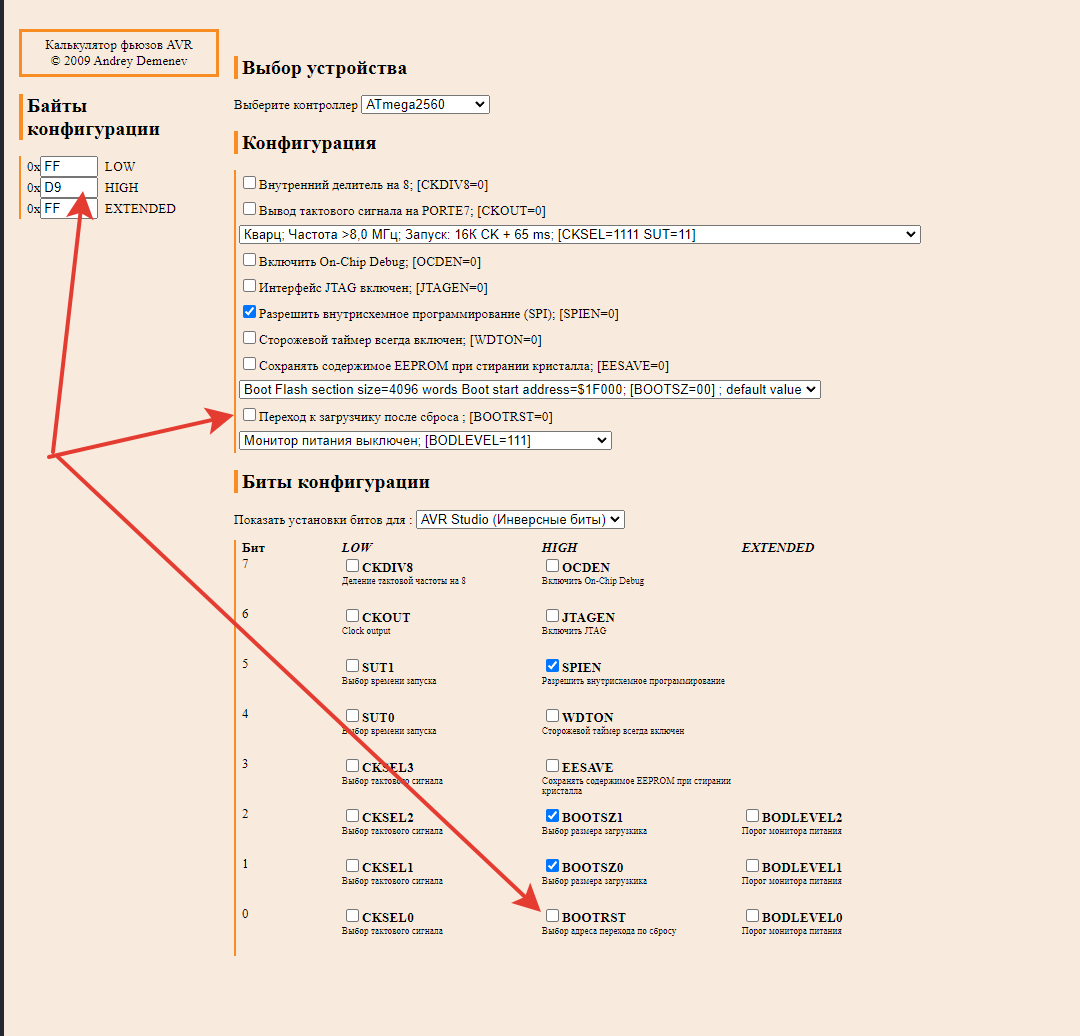
H - 0xD8 → H - 0xD9
можешь попробывать?
да, не работает, но если с этим фьюзом 0xD9 залить прошивку без загрузчика, то блинк работает…
Шью не из IDE
када ты шьешь программатором и у тебя D8, там пусто и ничего не работает
шью ARDUINO as ISP, во фьюзах D8 и, БЛИНК РАБОТАЕТ!!!
Тут сложно не быть дураком, D9 отправляет грузится с 0 адреса, но при D8 идёт загрузка с загрузчика, загрузчик целый, это я проверял
Да, сложно тут не быть дураком или не запить ))) (но не дзен-буддистам)
Что на выхлопе, если грузимся из IDE через программатор ARDUINO as ISP скетчи работают, если через USBasp не работают