Как то концепт надо изменить. Текущий имеет недостаток - не видно как робот рисует, движение пера маркера. Да и тяжеловат на внешний вид.
ИИ правильно ассоциацию уловил
Как то концепт надо изменить. Текущий имеет недостаток - не видно как робот рисует, движение пера маркера. Да и тяжеловат на внешний вид.
А чё, круто! Мне нравится!
Чтобы было видно - базу увеличить придётся и электронику разнести по сторонам.
Как вариант - прозрачную ардуину приобрести.
тележки культ фаллический судьба сведёт на нет (по Т.Шаову (с))
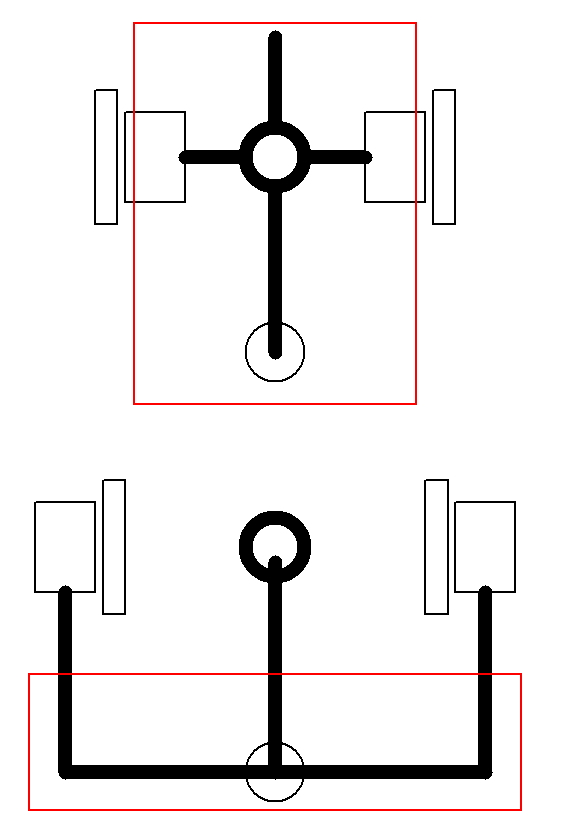
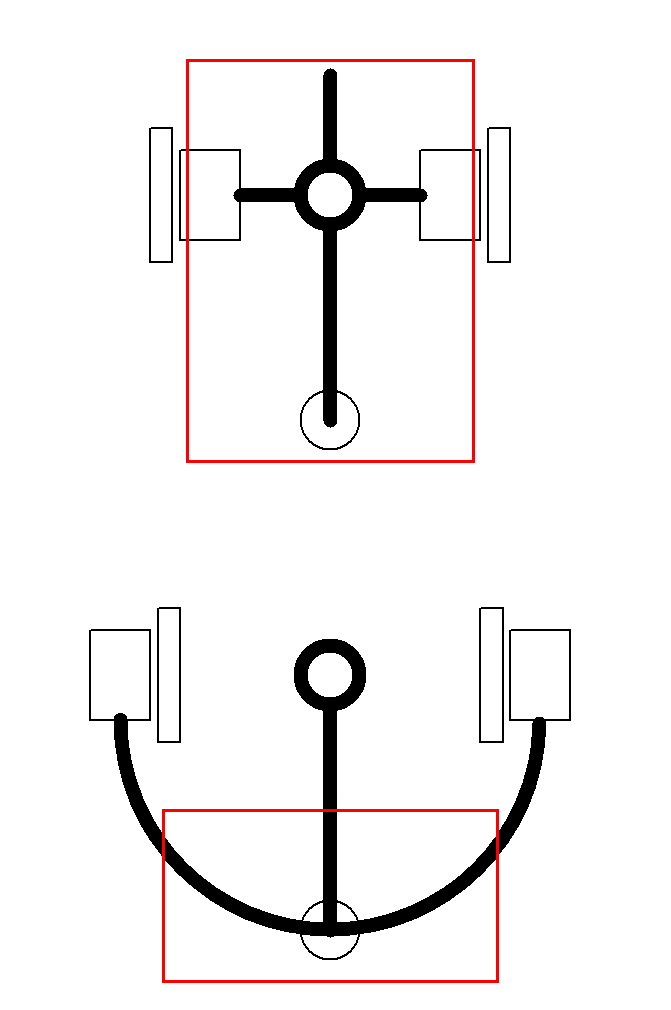
Есть у меня опасения, что вынесенное от центра колёсной пары рисовало крайне усложнит алгоритм формирования результата. Сможет ли тележка изменить направление движения на 90 градусов, не меняя положения пера?
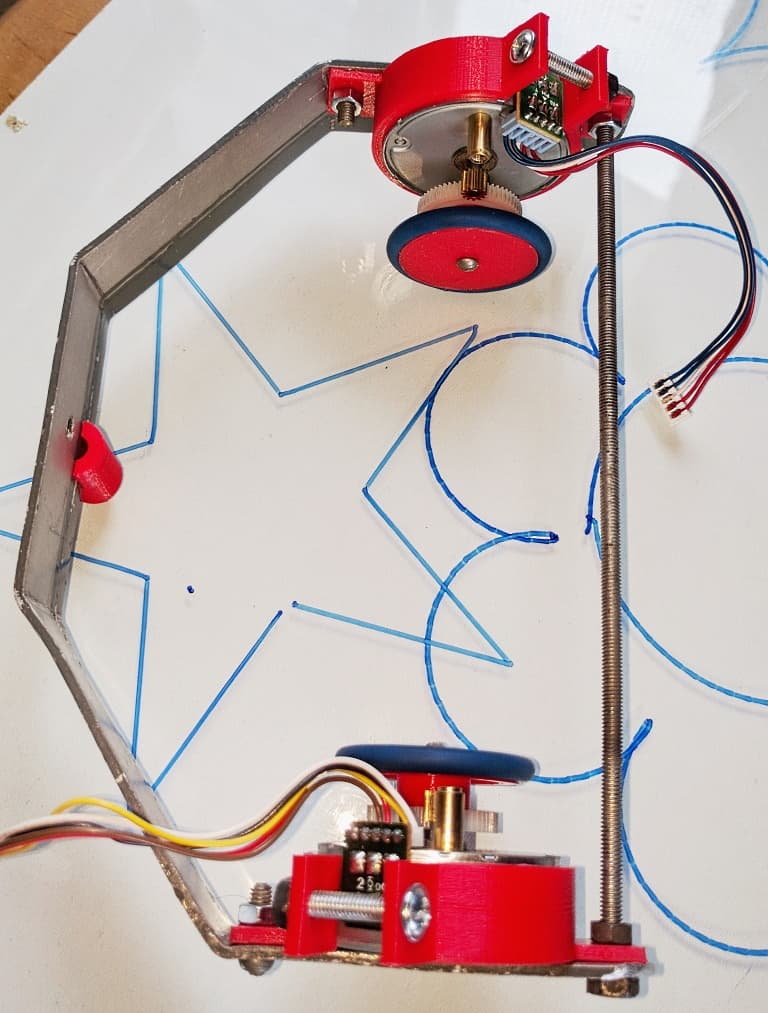
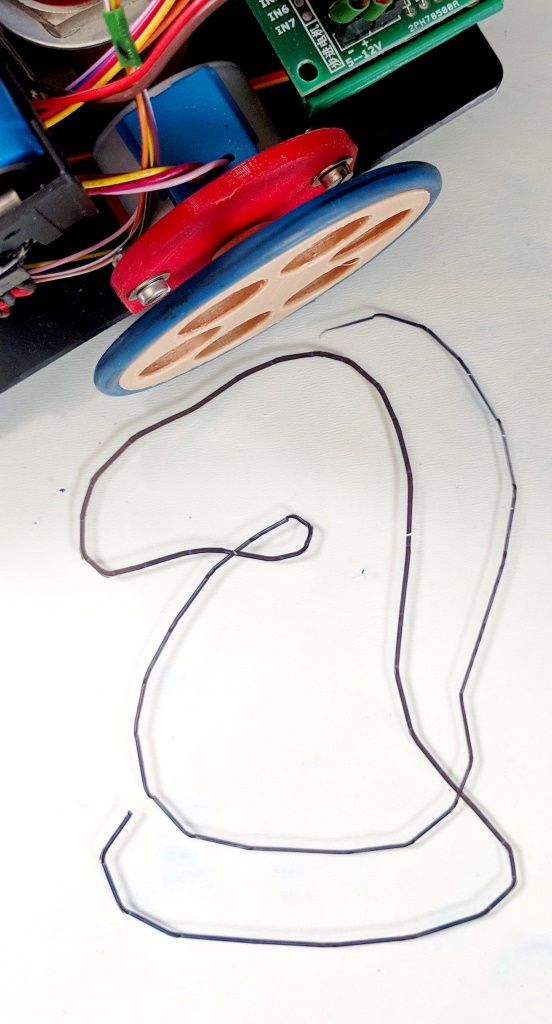
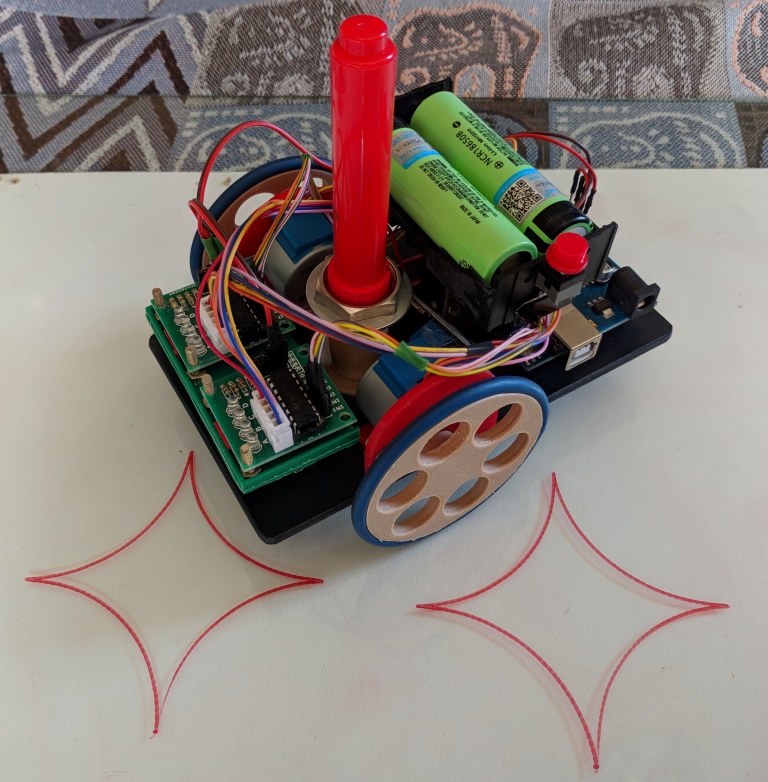
Нет, маркер строго на оси колёс, между. В этом изюминка проекта автора. А замена уплотнительных колец, фиксированного диаметра на отрезок скакалки в качестве покрышек позволяет чётко определять номинал шага движения в 0,25 мм и 0,5 градуса к примеру. На нижней картинке мой вариант - “вывернутые” моторы.
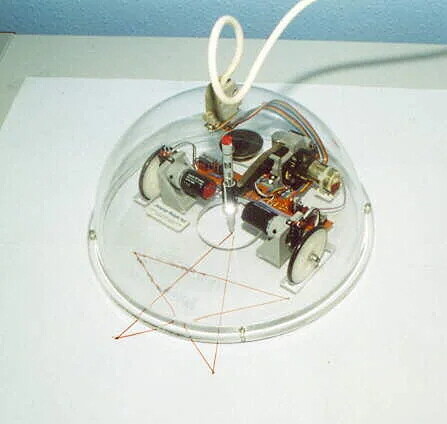
У Кена вообще процесс рисования не виден.
https://www.youtube.com/watch?v=j0FpB0iv0v0
глянь личку
https://playgroundai.com/create
Вот здесь балуюсь, на предмет улучшения исходника не пробовал.
вот так и сдают информацию, откуда десятина пошла )))
Ты шарик от мыши видел ?
Вот чем то таким и замени
не пойдёт, площади контактных поверхностей сильно неадекватные
Шарик от мыши - ни разу не опора.
Пока в ожидании комплектующих, думаю просто заменить качение (которого нет) на скольжение - распечатанная опора-полусфера.
Сейчас пробую ик управление с пульта в трёх уровнях: рисование на глазок (кнопочная навигация), точное построение отрезков и дуг по набору числовых значений через пульт, отображение готовых рисунков-шаблонов выбором с пульта. Каждый способ имеет свои недостатки и достоинства. Но в целом проблема одна - нужно уметь переводить линии картинки в длины отрезков-дуг и градусы поворотов.
Где можно искать готовое ПО по данной тематике?
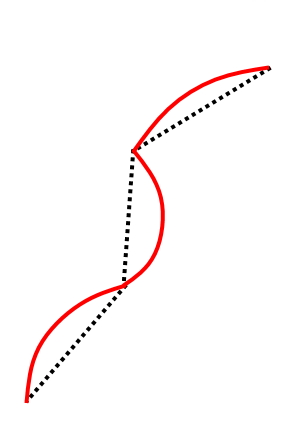
Нет ничего, особенно если не знать чего хочешь. Пока придумался вариант натягивания дуг на каркас мысленно рисуемой ломаной.
int fwd_mask[][4] = {{1, 0, 1, 0},
{0, 1, 1, 0},
{0, 1, 0, 1},
{1, 0, 0, 1}};
int rev_mask[][4] = {{1, 0, 0, 1},
{0, 1, 0, 1},
{0, 1, 1, 0},
{1, 0, 1, 0}};
Надо уменьшать шаг в 4 раза, сводя до 0,5 мм и градуса. С точки зрения программирования надо хранить последние поданные значения на каждую фазу каждого мотора. То есть отказаться от использования массивов-масок и переделать, но как (попроще)?
Вот базовый скетч автора (если кто понимает)
// Download and install Trinket Pro drivers from
// https://learn.adafruit.com/introducing-pro-trinket/starting-the-bootloader
// [Tools] -> [Programmer] -> "USBtinyISP"
// [Tools] -> [Board] -> "Pro Trinket 3V/12 Mhz (USB)"
#include <Servo.h>
// setup servo
int servoPin = 8;
int PEN_DOWN = 170; // angle of servo when pen is down
int PEN_UP = 80; // angle of servo when pen is up
Servo penServo;
int wheel_dia=66.25; // # mm (increase = spiral out)
int wheel_base=112; //, # mm (increase = spiral in)
int steps_rev=128; //, # 512 for 64x gearbox, 128 for 16x gearbox
int delay_time=6; // # time between steps in ms
// Stepper sequence org->pink->blue->yel
int L_stepper_pins[] = {10, 12, 13, 11};
int R_stepper_pins[] = {3, 5, 6, 4};
int fwd_mask[][4] = {{1, 0, 1, 0},
{0, 1, 1, 0},
{0, 1, 0, 1},
{1, 0, 0, 1}};
int rev_mask[][4] = {{1, 0, 0, 1},
{0, 1, 0, 1},
{0, 1, 1, 0},
{1, 0, 1, 0}};
void setup() {
randomSeed(analogRead(1));
// put your setup code here, to run once:
Serial.begin(9600);
for(int pin=0; pin<4; pin++){
pinMode(L_stepper_pins[pin], OUTPUT);
digitalWrite(L_stepper_pins[pin], LOW);
pinMode(R_stepper_pins[pin], OUTPUT);
digitalWrite(R_stepper_pins[pin], LOW);
}
penServo.attach(servoPin);
Serial.println("setup");
}
void loop(){ // draw a calibration box 4 times
pendown();
for(int x=0; x<12; x++){
forward(100);
left(90);
}
penup();
done(); // releases stepper motor
while(1); // wait for reset
}
// ----- HELPER FUNCTIONS -----------
int step(float distance){
int steps = distance * steps_rev / (wheel_dia * 3.1412); //24.61
/*
Serial.print(distance);
Serial.print(" ");
Serial.print(steps_rev);
Serial.print(" ");
Serial.print(wheel_dia);
Serial.print(" ");
Serial.println(steps);
delay(1000);*/
return steps;
}
void forward(float distance){
int steps = step(distance);
Serial.println(steps);
for(int step=0; step<steps; step++){
for(int mask=0; mask<4; mask++){
for(int pin=0; pin<4; pin++){
digitalWrite(L_stepper_pins[pin], rev_mask[mask][pin]);
digitalWrite(R_stepper_pins[pin], fwd_mask[mask][pin]);
}
delay(delay_time);
}
}
}
void backward(float distance){
int steps = step(distance);
for(int step=0; step<steps; step++){
for(int mask=0; mask<4; mask++){
for(int pin=0; pin<4; pin++){
digitalWrite(L_stepper_pins[pin], fwd_mask[mask][pin]);
digitalWrite(R_stepper_pins[pin], rev_mask[mask][pin]);
}
delay(delay_time);
}
}
}
void right(float degrees){
float rotation = degrees / 360.0;
float distance = wheel_base * 3.1412 * rotation;
int steps = step(distance);
for(int step=0; step<steps; step++){
for(int mask=0; mask<4; mask++){
for(int pin=0; pin<4; pin++){
digitalWrite(R_stepper_pins[pin], rev_mask[mask][pin]);
digitalWrite(L_stepper_pins[pin], rev_mask[mask][pin]);
}
delay(delay_time);
}
}
}
void left(float degrees){
float rotation = degrees / 360.0;
float distance = wheel_base * 3.1412 * rotation;
int steps = step(distance);
for(int step=0; step<steps; step++){
for(int mask=0; mask<4; mask++){
for(int pin=0; pin<4; pin++){
digitalWrite(R_stepper_pins[pin], fwd_mask[mask][pin]);
digitalWrite(L_stepper_pins[pin], fwd_mask[mask][pin]);
}
delay(delay_time);
}
}
}
void done(){ // unlock stepper to save battery
for(int mask=0; mask<4; mask++){
for(int pin=0; pin<4; pin++){
digitalWrite(R_stepper_pins[pin], LOW);
digitalWrite(L_stepper_pins[pin], LOW);
}
delay(delay_time);
}
}
void penup(){
delay(250);
Serial.println("PEN_UP()");
penServo.write(PEN_UP);
delay(250);
}
void pendown(){
delay(250);
Serial.println("PEN_DOWN()");
penServo.write(PEN_DOWN);
delay(250);
}
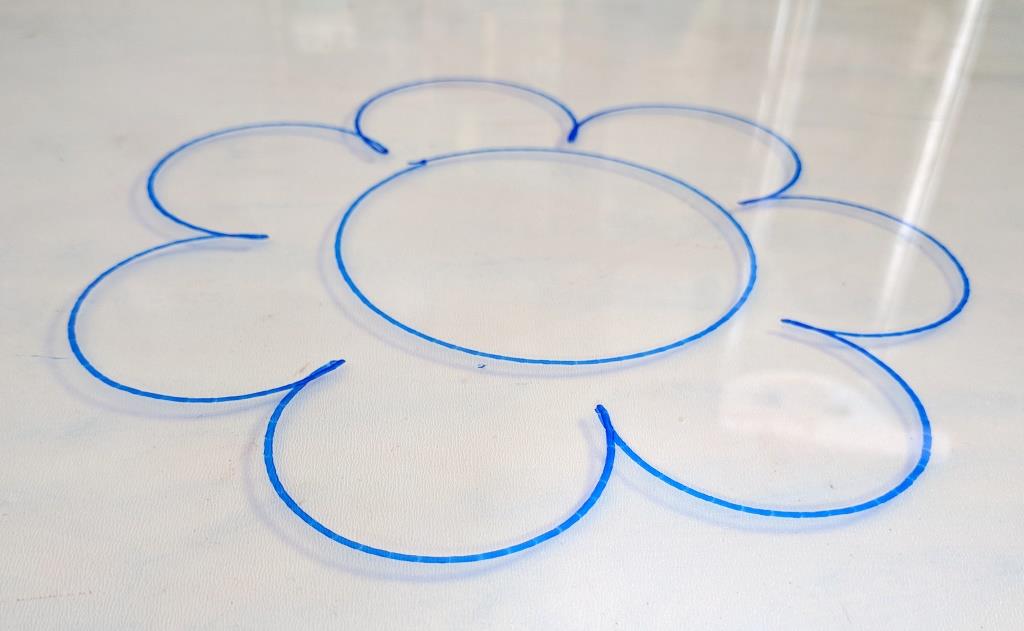
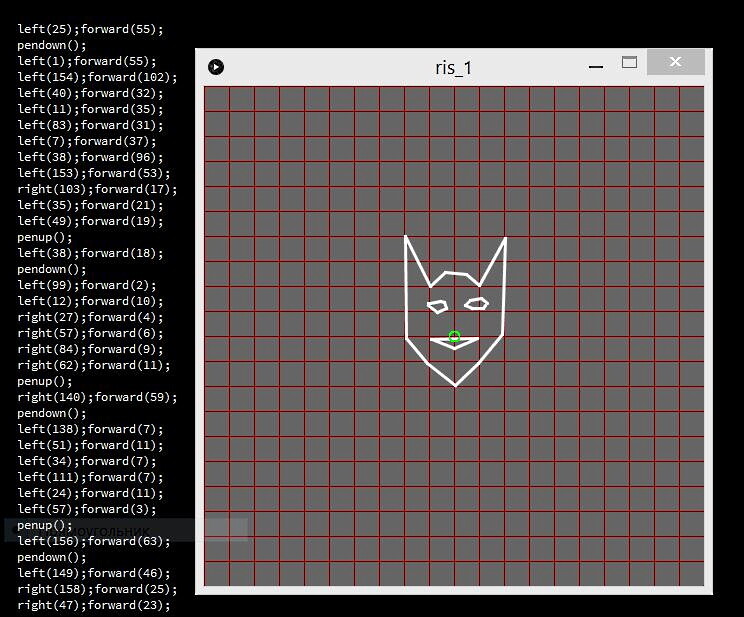
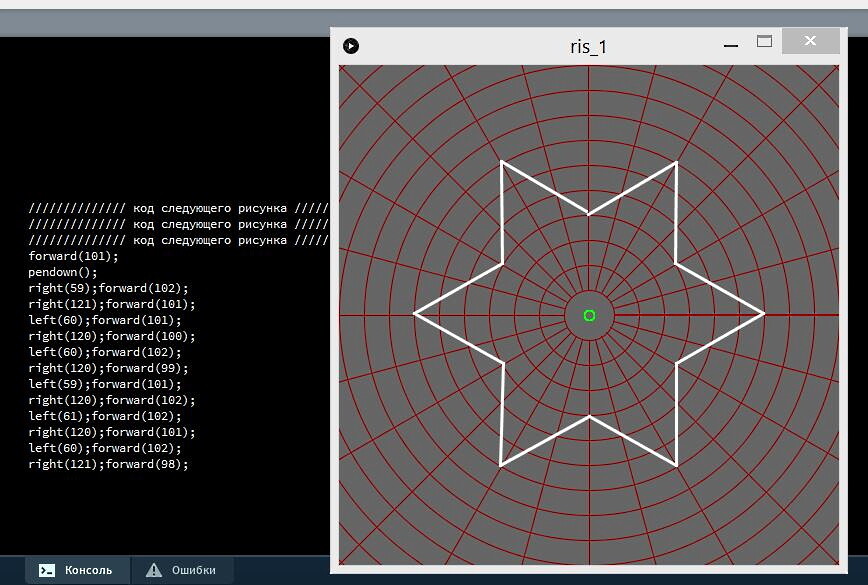
Удалось совершить очередной прорыв в нанотехнологиях - создал на “процессенге” ПО (строк 20-30) для генерации кода роботу-рисовальщику.