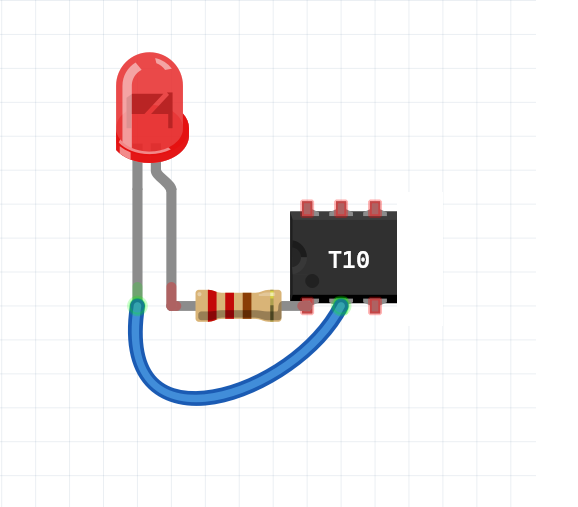
Всем доброго времени суток. Решил я сделать простейшую систему автополива на Attiny 10. За основу взял код от Гайвера. Там использовался Digispark, то-есть Attiny85. Для такой простой задачи, как по мне ее слишком много, но как знаем - Гайвер за доступность, так что это моё мнение. Код в Attiny 10 занял 416 байт (40%), поместился бы и в Attiny 5 но её у меня нет. Прошивать Attiny 10 нужно по такой схеме с помощью USBasp, она использует свой интерфейс - TPI
Какая разница, что у тебя есть и чего нет?
Раз поместился бы в Attiny 5, то и должен быть на Attiny 5.
Иначе рассуждения про избыточность Attiny 85 явно притянуты за уши.
Если речь об избыточности, то нафига тут digitalWrite() и pimMode()? Поменяйте на регистры и оно, может, в какую-нибудь Аттини2 вошло бы или что там меньше Тини5?
Не то же самое. У вас всего один пин, а значит переменную можно заменить константой. Код для константы будет короче и быстрее.
Вообще, не понятна ваша реакция. Это же Вы сами завели разговор об “избыточности” - а значит вам должны быть интересны советы, как эту избыточность ещё уменьшить.
Если вы выложили код, чтобы им все восторгались и не смели критиковать - надо было сразу так и написать:)
Нет конечно, критикуйте, а то зачем тогда я его выложил сюда?) Делал проще - вот так и получилось, да и понять pinMode новичку как по мне проще чем всякие PORTB