Требуется исполнитель : Любой город России. Надо изготовить :Система слежения за поворотными осями автомобиля на основе абсолютных энкодеров и 2 более простые функции . Планируемый бюджет : 20 тр (Обсуждается)
Сроки :1-2 месяца Оплата :Отправлю железо для настройки и предоплату. После расчета отправляете все обратно + весь проект без ограничений . Для связи : Вотцапы шмотцапы +79286544000 Арсен.
Если готовы поучатвовать в проекте и имеете все компитенции велком. Буду очень раз поработать с профессионалами.
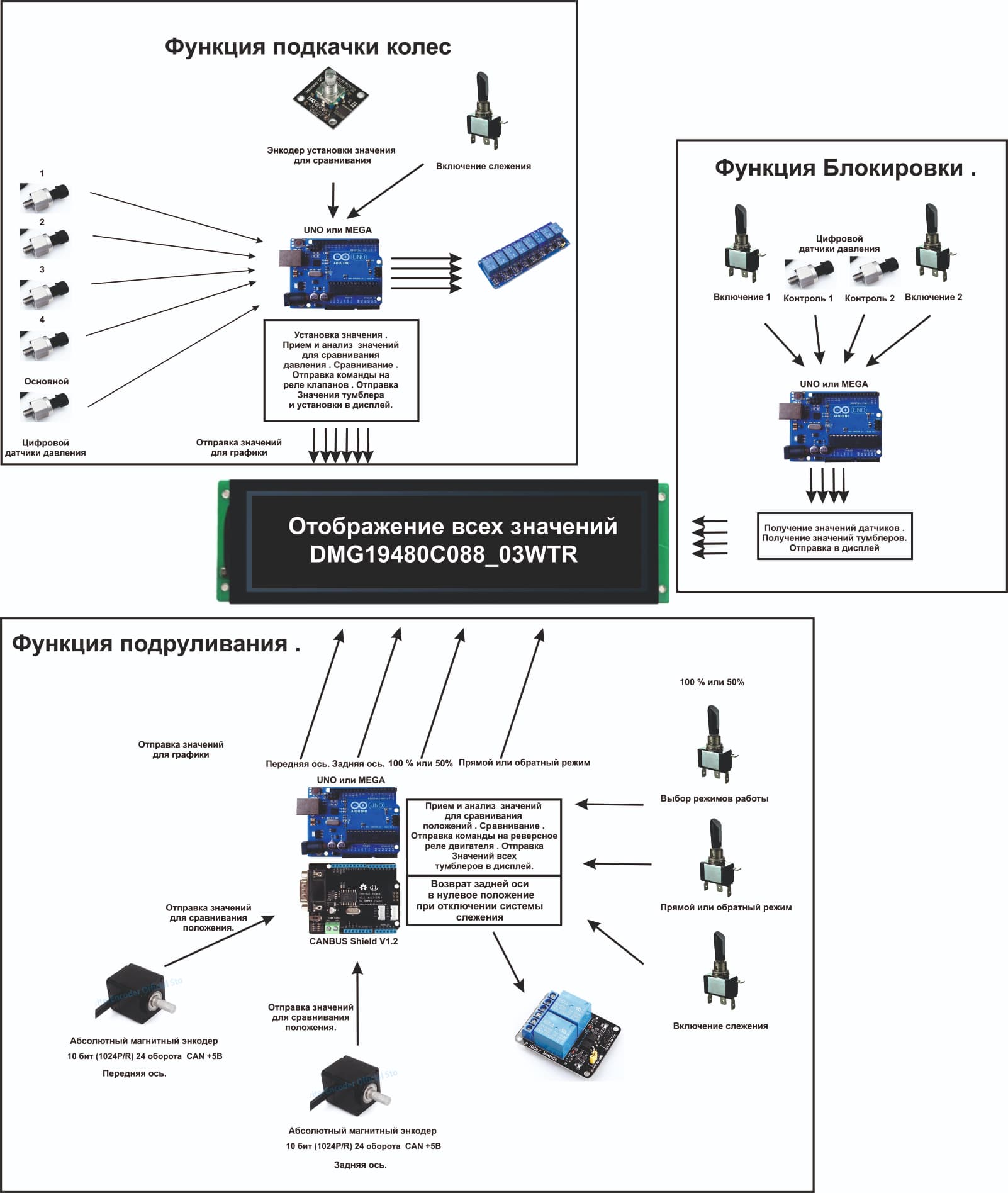
Вот приблизительно так. Колличество и модель основных модулей можно изменить в большую или меньшую сторону в зависимости от ограничений по портам или производительности
Ну для начало силовую часть рулевого привода я не озвучил ) Работает уже ,но на костылях ,ручками тумблерами без контроля положения. Нужно сделать по уму вот и решился на данную схему. А вопрос бюджета готов обсуждать с тем кто возмется.
Я, как все на форуме знают, считаю, что под свю ответственность можно воротить что угодно.Но тут даже я напишу, что на реальный авто для дорог общего пользования - не стоит.
Спорт для трека в открытом классе, или моделька - велкам! олвейс велкам! Но не на МКАД, если можно? Ведь можно? Пазя-азя…
Машина спортивная и именно для закрытого трека . Данные системы не новшество . Работают давно но как сказал выше на костылях…Нужно переходить на цифру )
Имеем полноуправляемый автомобиль то есть задняя ось тоже подруливает. Имеем 2 энкодера на каждой из рулевых реек . При включении системы слеженеия считываем показание с переднего энкодера -сравниваем с показанием заднего- определяем алгаритм (Крутится в туже строну или в противоположную , на тот же угол или меньше в 2 раза )- отправляем команду на реле 1 если в право нужно или на реле 2 есле в лево до тех пор пока значения не прейдет к заданому. При отключении системы селедим за положением только задней оси чтоб было в нуле.
да, я потом уже обратил внимание, но вопрос про быстродействие то остался, в realtime обработать данные энкодеров и других датчиков на AVR…че то я сомневаюсь.