Добрый день. Как нужно подключать IR приемник к ардуино? От драйвера двигателей идет на ардуино провод к контакту 5В. Куда ставить контакт от приемника на 5В. Не хватает контакта на 5 В на ардуино.
Опять вы?
А вас мама не учила, что заголовок должен отражать краткое содержание? Нафига все сообщение туда запихнули?
Народ, поправьте кто-нить заголовок
Сегодня пятница, всё идёт по плану ![]()
Спасибо. Я крону подключил. Так работает. Но с блютусом что то не получается. Вроде все подключил, когда нажимаешь на кнопки в приложении телефона писк от драйвера идет но не едет. Сейчас например от ИК все крутится, едет.
Так это же вы еще в прошлый раз спрашивали
Нафига было новую ветку создавать?
Вас тогда еще просили схему показать. Ну и где она?
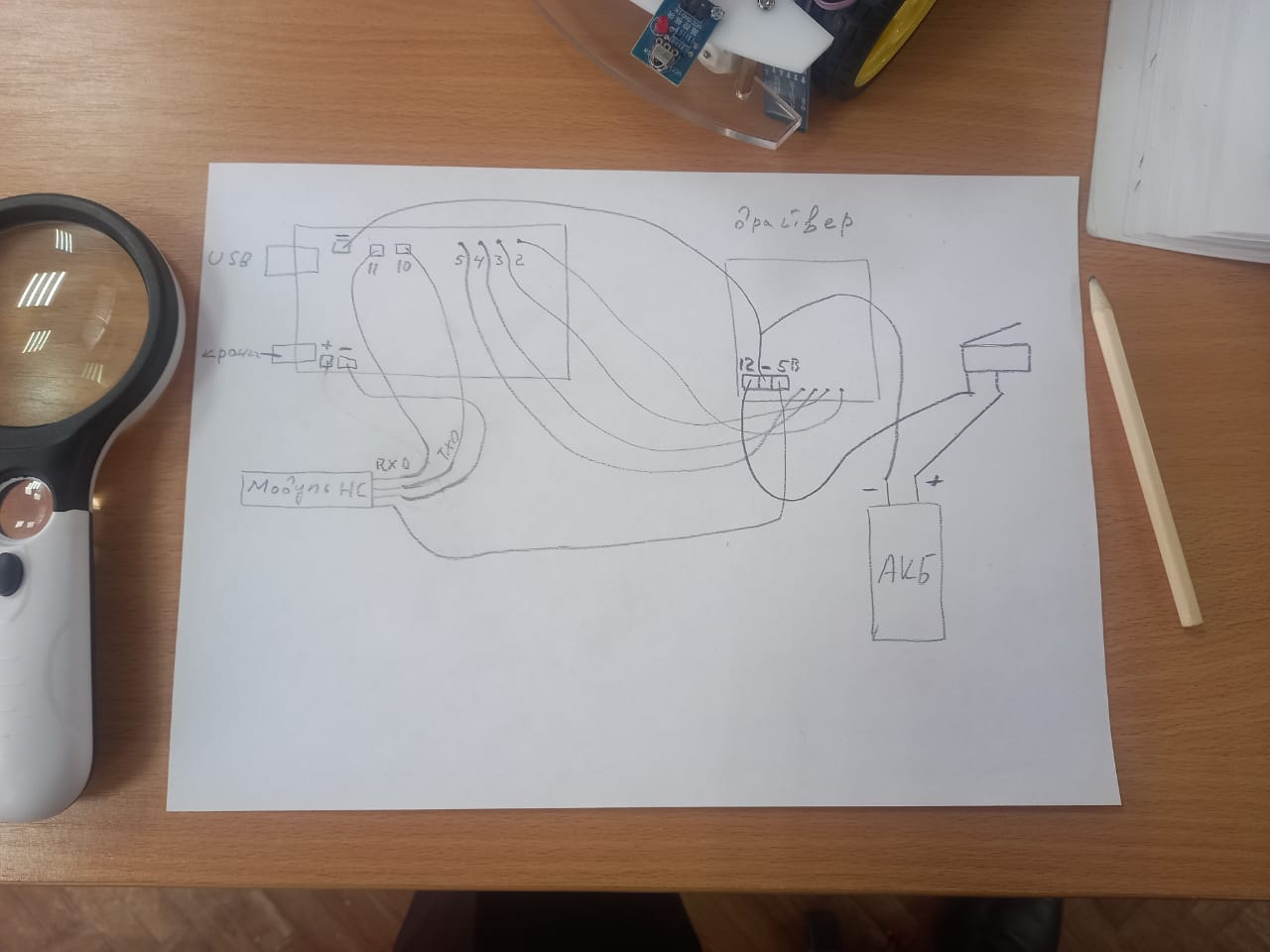
Схему в какой то программе надо выполнить или просто от руки на бумаге нарисовать и отправить можно?
можно
при условии что рисунок будет понятным
Заголовок поправьте.
“Как подключить IR-приемник к ардуино?” более чем достаточно, остальные две строки лишние
Это Крона пищит и умоляет уже её прикончить посредством КЗ. Чтоб не мучалась.
Как где? В режимном помещении. А Вы где храните секретные документы? Разве не там же?
Дело не в кроне. Без нее также.
#include <SoftwareSerial.h>
#include "motor.h"
#include "move_case.h"
//Создаем последовательный порт на пинах 13-чтение и 2-передача.
SoftwareSerial BTSerial(10, 11); // RX, TX
// Переменная для приема данных по Bluetooth.
char bt_input;
// Хранит время последнего нажатия кнопки.
unsigned long _time;
//=================================//
//== Функция инициализации
void setup()
{
// Переменные – номера контактов (пинов) Arduino.
// Для левых и правых моторов машинки.
setup_motor_system(2, 3, 4, 5);
_stop(); //Двигатели остановлены.
// Устанавливаем скорость передачи данных для НС-05 (Bluetooth-модуль).
BTSerial.begin(9600);
// Переключаем A0 в двоичный режим работы, на передачу.
// если вы его еще не отключили
pinMode(14, OUTPUT);
// Устанавливаем скорость передачи данных по кабелю.
// Порт компьютера
//Serial.begin(9600);
_time = micros();
}
// Основная программа.
void loop()
{
if (BTSerial.available())
{
// Читаем команду и заносим ее в переменную. char преобразует
// код символа команды в символ.
bt_input = (char)BTSerial.read();
// Отправляем команду в порт, чтобы можно было
// их проверить в "Мониторе порта".
//Serial.println(bt_input);
//Вызов функции выбора действия по команде
move_case(bt_input);
_time = micros();
}
if ((micros() - _time) > _move_time)
{
_stop();
}
if ((micros() - _time) >= 500)
{
_time = micros();
move_case(bt_input);
}
}
int motor_L1, motor_L2;
int motor_R1, motor_R2;
//===============================================
// Функция инициализации управления моторами.
void setup_motor_system(int L1, int L2, int R1, int R2)
{
// Заносятся в переменные номера контактов (пинов) Arduino.
motor_L1 = L1; motor_L2 = L2;
// Для левых и правых моторов робота.
motor_R1 = R1; motor_R2 = R2;
// Переводятся указанные порты в состояние вывода данных.
pinMode(motor_L1, OUTPUT);
pinMode(motor_L2, OUTPUT);
pinMode(motor_R1, OUTPUT);
pinMode(motor_R2, OUTPUT);
}
//===============================================
// движение вперед.
void forward()
{
// Если двигатель будет работать не в ту сторону,
// поменять на нем контакты местами.
digitalWrite(motor_L1, HIGH);
digitalWrite(motor_L2, LOW);
digitalWrite(motor_R1, HIGH);
digitalWrite(motor_R2, LOW);
}
//===============================================
// Поворот налево с блокировкой левых колес.
void forward_left()
{
// блокировка вращения левых колес.
digitalWrite(motor_L1, LOW);
digitalWrite(motor_L2, LOW);
// правые колеса вращаются.
digitalWrite(motor_R1, HIGH);
digitalWrite(motor_R2, LOW);
}
//===============================================
// Поворот направо с блокировкой правых колес.
void forward_right()
{
// левые колеса вращаются.
digitalWrite(motor_L1, HIGH);
digitalWrite(motor_L2, LOW);
// блокировка вращения правых колес.
digitalWrite(motor_R1, LOW);
digitalWrite(motor_R2, LOW);
}
// Поворот налево на месте.
void left()
{
// левые колеса вращаются назад.
digitalWrite(motor_L1, LOW);
digitalWrite(motor_L2, HIGH);
// правые колеса вращаются вперед.
digitalWrite(motor_R1, HIGH);
digitalWrite(motor_R2, LOW);
}
//===============================================
// Поворот направо на месте.
void right()
{
// левые колеса вращаются вперед.
digitalWrite(motor_L1, HIGH);
digitalWrite(motor_L2, LOW);
// правые колеса вращаются назад.
digitalWrite(motor_R1, LOW);
digitalWrite(motor_R2, HIGH);
}
// Включаем движение назад.
void backward()
{
// Смена направления вращения двигателей.
digitalWrite(motor_L2, HIGH);
digitalWrite(motor_L1, LOW);
digitalWrite(motor_R2, HIGH);
digitalWrite(motor_R1, LOW);
}
//===============================================
// Включаем движение назад.
void backward_left()
{
// Смена направления вращения двигателей.
digitalWrite(motor_L2, LOW);
digitalWrite(motor_L1, HIGH);
digitalWrite(motor_R2, HIGH);
digitalWrite(motor_R1, LOW);
}
//===============================================
// Включаем движение назад.
void backward_right()
{
// Смена направления вращения двигателей.
digitalWrite(motor_L2, HIGH);
digitalWrite(motor_L1, LOW);
digitalWrite(motor_R2, LOW);
digitalWrite(motor_R1, HIGH);
}
//===============================================
void _stop()
{
// Блокировка всех колес.
digitalWrite(motor_L2, LOW);
digitalWrite(motor_L1, LOW);
digitalWrite(motor_R2, LOW);
digitalWrite(motor_R1, LOW);
}
unsigned long _move_time;
// == Выбор действий
void move_case(char bt_input)
{
switch (bt_input) {
// Вперед
case 'F':
forward();
break;
// Назад
case 'B':
backward();
break;
// Влево
case 'L':
left();
break;
// Вправо
case 'R':
right();
break;
// Прямо и влево
case 'G':
forward_left();
break;
// Прямо и вправо
case 'I':
forward_right();
break;
// Назад и влево
case 'H':
backward_left();
break;
// Назад и вправо
case 'J':
backward_right();
break;
// Стоп
case 'S':
_stop();
break;
// Скорость 0%
case '0':
_move_time = 0;
break;
// Скорость 10%
case '1':
_move_time = 50;
break;
// Скорость 20%
case '2':
_move_time = 100;
break;
// Скорость 30%
case '3':
_move_time = 150;
break;
// Скорость 40%
case '4':
_move_time = 200;
break;
// Скорость 50%
case '5':
_move_time = 250;
break;
// Скорость 60%
case '6':
_move_time = 300;
break;
// Скорость 70%
case '7':
_move_time = 350;
break;
// Скорость 80%
_move_time = 400;
break;
// Скорость 90%
case '9':
_move_time = 450;
break;
// Скорость 100%
case 'q':
_move_time = 500;
break;
case 'X':
//switch_rejim = 1;
break;
case 'x':
//switch_rejim = 0;
break;
case 'D':
_stop(); //switch_rejim = 0;
break;
}
}
Это код. Три вкладки.
Ну что там???
На схеме откровенных косяков не вижу, кроме того что Мега запитана от Кроны. Крона может сдохнуть в любую минуту, это очень слабая батарейка.
Лучше возьмите зарядник от мобилы с USB штекером и запитайте Мега от него
Моторов сколько и как подключены? На схеме их нет.
И что за моторы-то?
И да, еще что за АКБ - напряжение, емкость
Кирдык, не схема! Моторов нет. Источник питания “сферический” … В общем, того, кто пошёл на поводу и сказал
пороть надо!