@ЕвгенийП
Спокойно, не хотите - не участвуйте
Не знаю, посмотрел ваш-неваш скетч, строки 43-51 что делают? Реализуют реакцию на фиксацию кнопок? Какие то микросы, какие то стопы. Может поэтому пищат обмотки - постоянно моторы включаются-отключаются?
…ещё из постоянных проблем таких скетчей это символ ‘\n’ (или палкой наоборот ![]()
На этот вопрос будет третья отдельная тема на 500 сообщений. Терпения тебе, мой друг, всему своё время.
В пятницу-то? А чем заниматься?
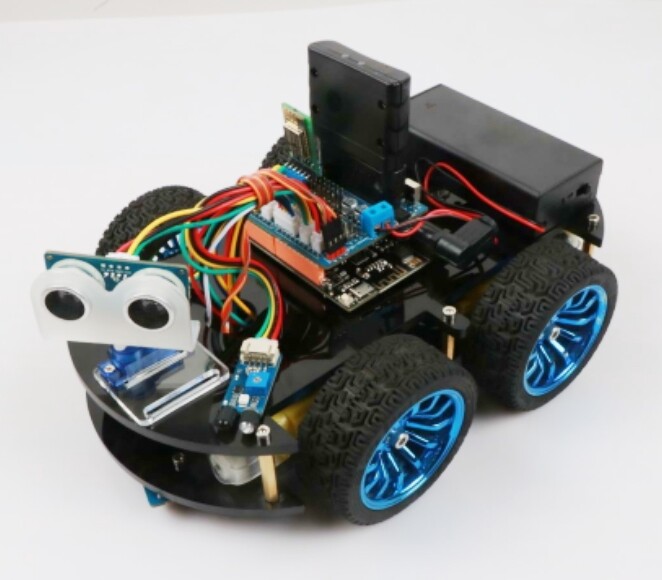
Моторов 4. Желтые мотор редукторы.
Ну где ты провалился?
Закомментируй строку 45,50 строку и отпишись, что поменялось, кроме сдыхания кроны.
Да, так гораздо удобнее читать.
Незнаю что сказать. Что там исправить?
Прям как граффити на выносном туалете заброшенного дома культуры Мухосранска.
#include <SoftwareSerial.h>
#include "motor.h"
#include "move_case.h"
//Создаем последовательный порт на пинах 13-чтение и 2-передача.
SoftwareSerial BTSerial(10, 11); // RX, TX
// Переменная для приема данных по Bluetooth.
char bt_input;
// Хранит время последнего нажатия кнопки.
unsigned long _time;
//=================================//
//== Функция инициализации
void setup()
{
// Переменные – номера контактов (пинов) Arduino.
// Для левых и правых моторов машинки.
setup_motor_system(2, 3, 4, 5);
_stop(); //Двигатели остановлены.
// Устанавливаем скорость передачи данных для НС-05 (Bluetooth-модуль).
BTSerial.begin(9600);
// Переключаем A0 в двоичный режим работы, на передачу.
// если вы его еще не отключили
pinMode(14, OUTPUT);
// Устанавливаем скорость передачи данных по кабелю.
// Порт компьютера
//Serial.begin(9600);
_time = micros();
}
// Основная программа.
void loop()
{
if (BTSerial.available())
{
// Читаем команду и заносим ее в переменную. char преобразует
// код символа команды в символ.
bt_input = (char)BTSerial.read();
// Отправляем команду в порт, чтобы можно было
// их проверить в "Мониторе порта".
//Serial.println(bt_input);
//Вызов функции выбора действия по команде
move_case(bt_input);
_time = micros();
}
if ((micros() - _time) > _move_time)
{
// _stop();
}
if ((micros() - _time) >= 500)
{
_time = micros();
// move_case(bt_input);
}
}
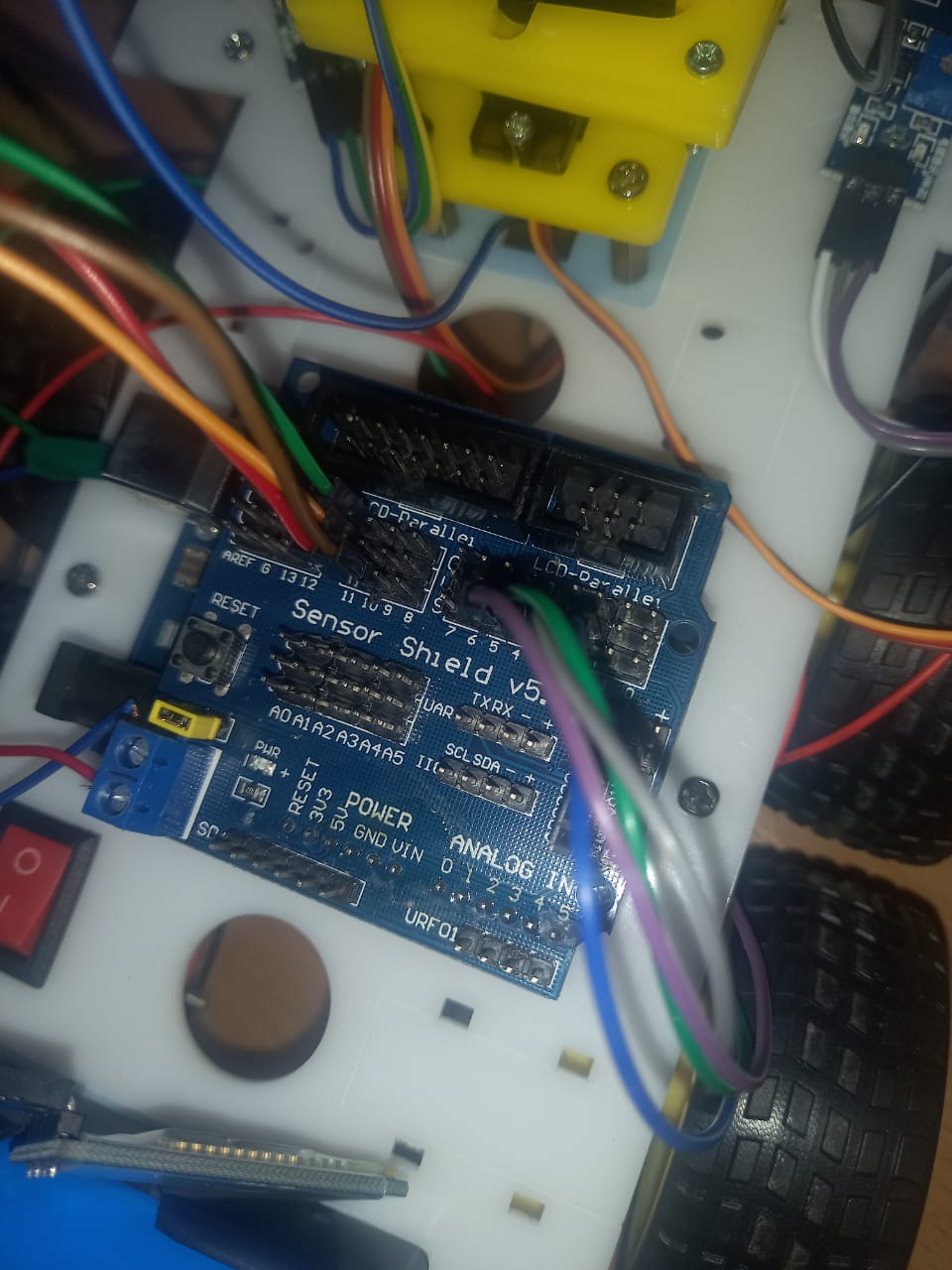
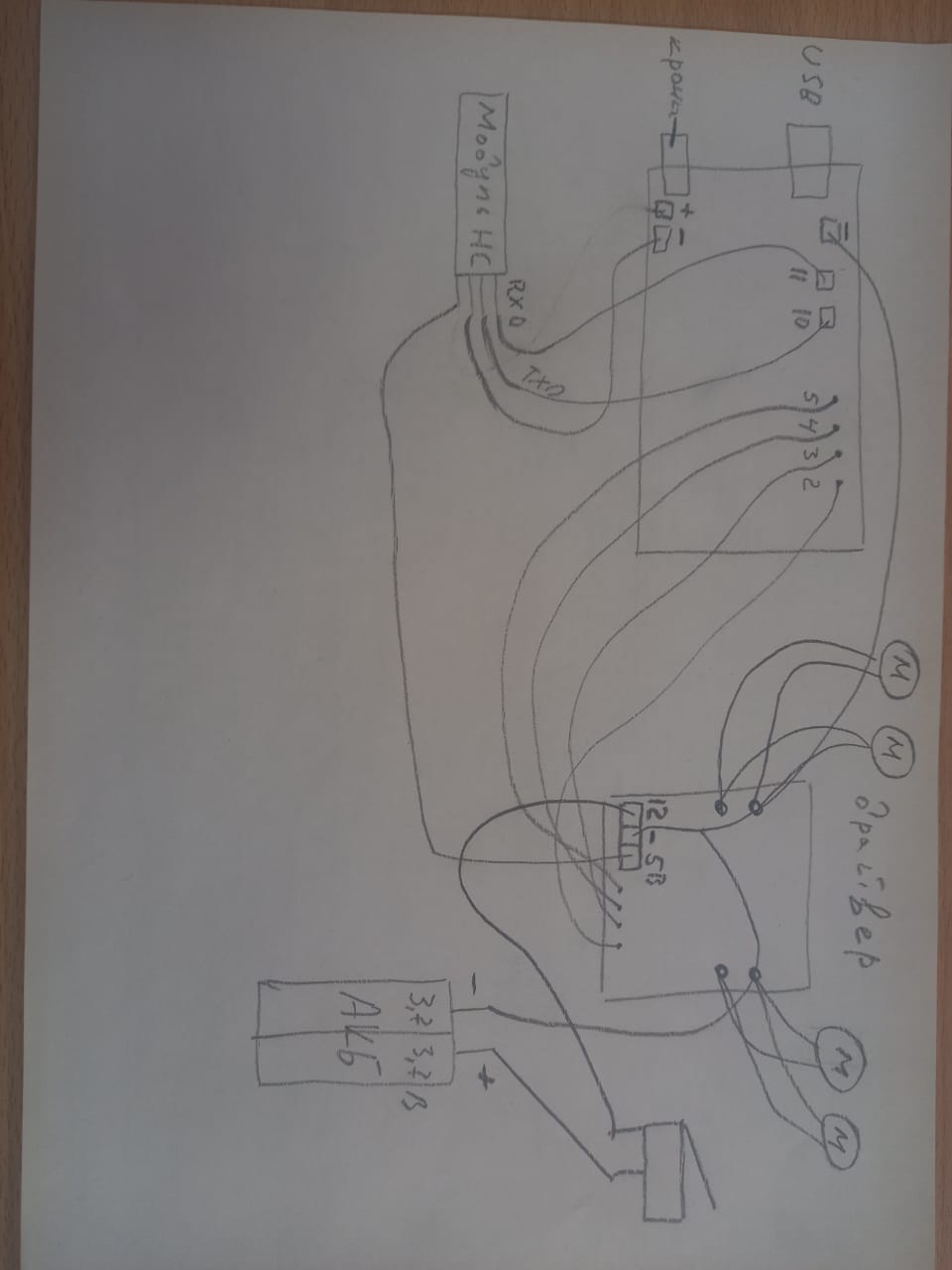
Переподключил через сенсор шилд
справа двигатели подключены, слева модуль блютус
Кому ты это пишешь?
Всем специалистам
А так с таким набором ни кто не работал?
Молодец! Скетч перезагрузи по поправкам, что я дал.
Ничего себе. Есть реакция. ![]()
![]()
![]()