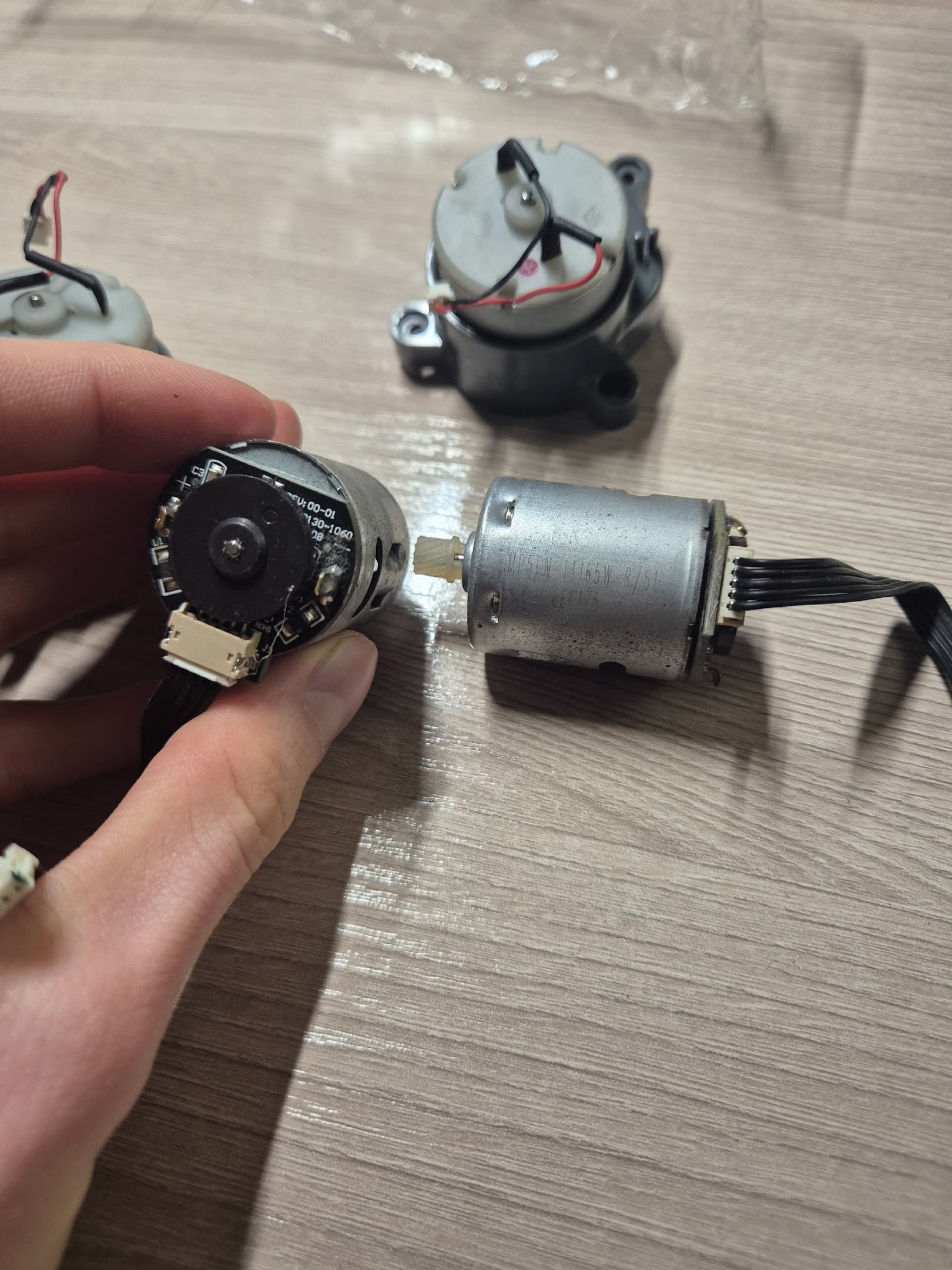
всем привет, после разбора робота пылесоса ilife остались 2 сервопривода mp5fn 14165w r51 даташит в гугле и яндексе не нашёл на них. Есть шанс как-то подключить их к ардуино или проще выкинуть и купить новые и с даташитом?
С чего бы это сервоприводы?
Приводы колес робота пылесоса…
Так сервоприводы или шаговые двигатели?
да, судя по описанию в гугле это скорее шаговый движок, перепутал
И даже не шаговый, а обычный коллекторный моторчик. Есть даташит на серию mp5fn, но там нет конкретной модели 14165w, есть только её родственники. Надо? Держите
Кстати, я переделывал робот пылесос в “кототроллер” и подключал его моторы к контроллеру. Не помню какие там моторы были, но тоже коллекторные. Показать как подключал?
1 лайк
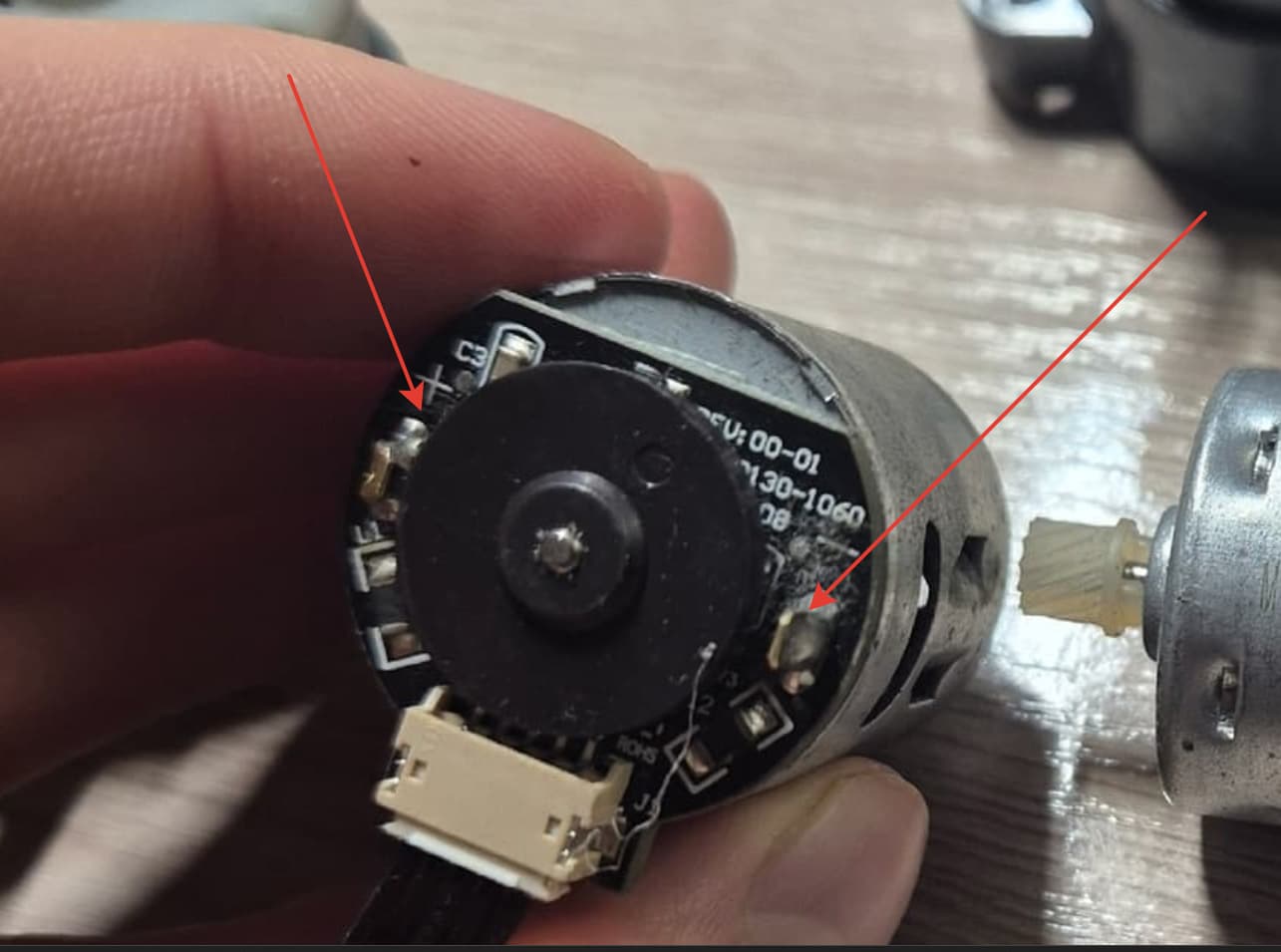
да это обыкновенный коллекторный двигатель, а плате два вывода торчат.
ни и прикрутили диск с магнитом, видимо какая то тахо схема.
Спасибо, было бы классно
Блин, я думал что раз какая-то плата прилеплена и 5 проводов то полюбому шаговик)
Ну, вот, смотрите, как всё у меня сделано:
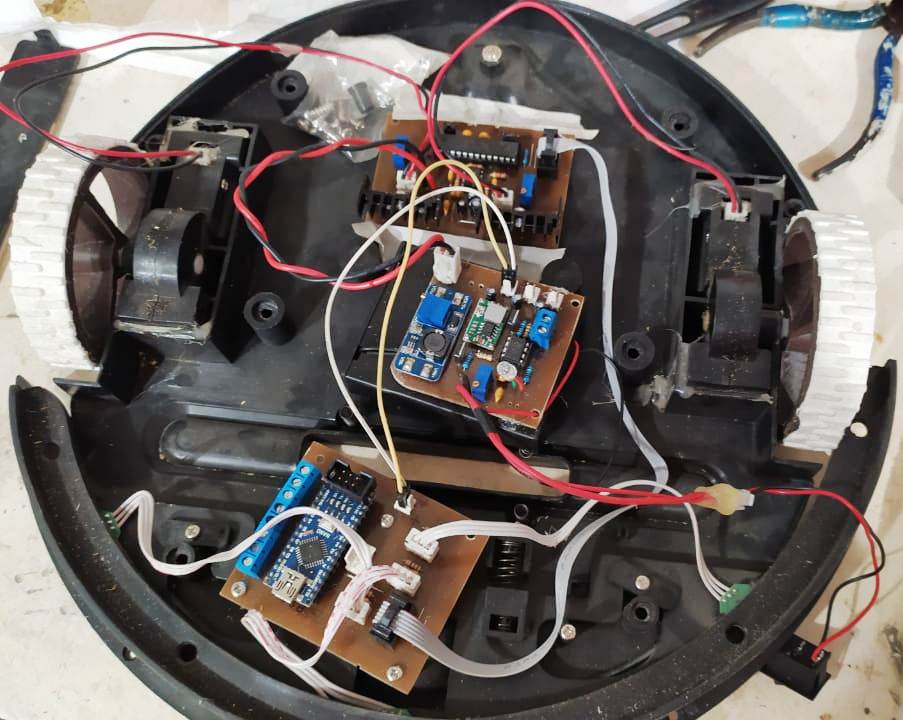
Давайте начнём от печки (от питания). Питанием всего занимается средняя плата (у неё снизу три аккумулятора приклеены). Она выдаёт 5В на плату управления (нижнюю) и 14В на плату управления моторами (верхнюю) для питания моторов.
Самая верхняя плата – драйвер управления моторами. Сделан на ATmega328p. Эта плата получает команды и питание логики от управляющей платы (самая нижняя) через шестипиновый шлейф (походит справа светло-серый). Питание для моторов она получает непосредственно от платы питания (скрученные красный и чёрный провода). Непосредственно моторами управляют две микросхемы TA7291P (по одной на каждый мотор). Это они там на радиаторах стоят ближе к нам. Референсное напряжение на них подаётся с операционного усилителя LM358 (по одному на одну TA7291P) на которых собраны два ЦАПа, преобразующие ШИМ от ATmega328p в постоянное референсное напряжение. Ну, а цифровое управление TA7291P идёт непосредственно с ATmega328p. Вообще, TA7291P подключены по схеме из даташита, ничего там особенного нет.
Наконец, управляющая плата (нижняя) там тупо сидит нанка, подключены всякие датчики пылесоса и драйвер моторов.
Всё, что Вы видите “лишнего” (разъёмы питания к которым ничего не подключено, разъёмы на главной плате и т.п.) это всё для всяких устройств собственно кототроллера, сейчас они отключены и убраны.
Ну, как-то так. Если надо, разумеется, у меня есть и платы в спринтлэйауте и прошивка какая-никакая, куда ж оно денется, всё валяется.
Всем спасибо)
Собственно говоря, а что это такое?)) Интересно.
Ну, я же писал – кототроллер – «устройство для троллинга кота».
Сейчас с него сняты все приспособы для собственно троллинга, я их убрал, т.к. ТС просил подключение моторов показать. Там на плате питания и на плате управления свободные разъёмы как раз для них.
Собственно устройства троллинга могут быть любыми, изначально так и задумывалось – оставить разъёмы питания и управления, а сами устройства добавлять и менять по мере фантазии (ну, и прошивку под них дописывать по мере необходимости).
Кстати, обратите внимание на резину на колёсах. Она «самогонная», я как-то описывал, как я её делал.
1 лайк