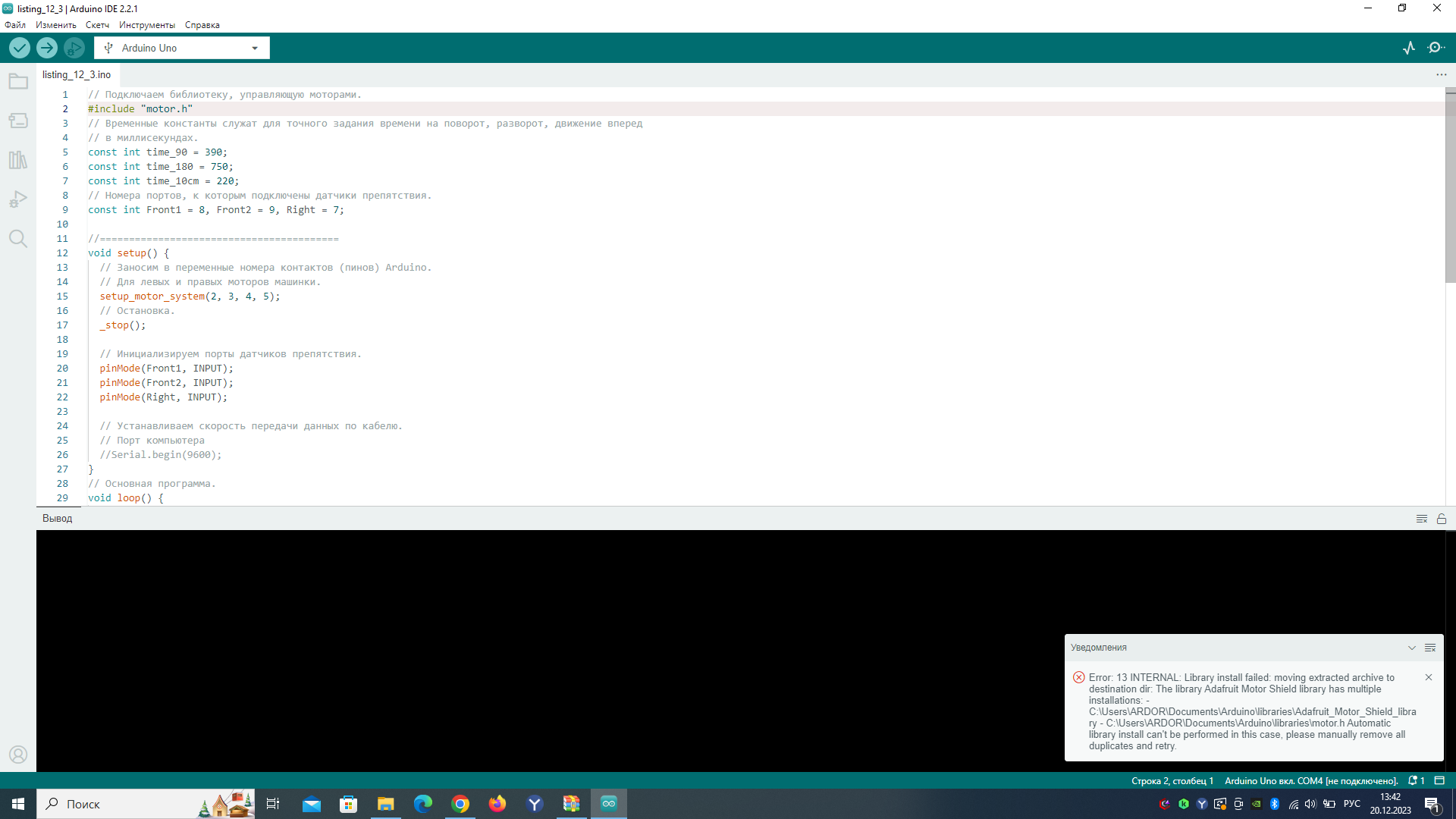
// Подключаем библиотеку, управляющую моторами.
#include "motor.h"
// Временные константы служат для точного задания времени на поворот, разворот, движение вперед
// в миллисекундах.
const int time_90 = 390;
const int time_180 = 750;
const int time_10cm = 220;
// Номера портов, к которым подключены датчики препятствия.
const int Front1 = 8, Front2 = 9, Right = 7;
//=========================================
void setup() {
// Заносим в переменные номера контактов (пинов) Arduino.
// Для левых и правых моторов машинки.
setup_motor_system(2, 3, 4, 5);
// Остановка.
_stop();
// Инициализируем порты датчиков препятствия.
pinMode(Front1, INPUT);
pinMode(Front2, INPUT);
pinMode(Right, INPUT);
// Устанавливаем скорость передачи данных по кабелю.
// Порт компьютера
//Serial.begin(9600);
}
// Основная программа.
void loop() {
boolean d_Front1, d_Front2, d_Right;
d_Front1 = digitalRead(Front1);
d_Front2 = digitalRead(Front2);
d_Right = digitalRead(Right);
// Если ни один датчик не сработал.
if (d_Front1 && d_Front2 && d_Right) {
forward_right(); //подворот вправо.
delay(time_90 / 9);
forward(); // едем вперед.
delay(time_10cm / 2);
} else {
//Если сработал один из передних датчиков и не сработал правый.
if ((!d_Front1) || (!d_Front2)) {
//Если не сработал правый датчик.
if (d_Right) {
// поворачиваем направо на 90 градусов.
right();
delay(time_10cm);
} else {
// поворачиваем налево на 90 градусов.
left();
delay(time_10cm);
}
} else { // Если сработал правый датчик.
forward_left(); //подворот влево.
delay(time_90 / 9);
forward(); // едем вперед.
delay(time_10cm / 2);
}
}
}
C:\Users\ARDOR\AppData\Local\Temp\Rar$DIa0.044\listing_12_3\listing_12_3.ino:2:10: fatal error: motor.h: No such file or directory
#include “motor.h”
^~~~~~~~~
compilation terminated.
exit status 1
Compilation error: motor.h: No such file or directory