Вечер добрый, коллеги! Пытаюсь перелопатить свою старую автоматику винокура, столкнулся с невыполнением функции по прерыванию. Ардуино Мега 2560. Железо проверил - контакты надежные, сигнал на ногу прерывания приходит. На пробу убрал из скетча ВСЁ, что не касается прерывания на 18-м пине (INT5) - заработало. Стал “есть слона по частям” (убирать фрагменты) - никак не могу найти, где капкан - в мониторе переменная “but_setup_val”, которая в функции “void BUTTON_SETUP()“ должна по кнопке прибавляться, остается нулевой. Гляньте свежим глазом, пожалуйста, где я напортачил? Специально выкладываю скетч целиком - может, я где-то был невнимателен или по незнанию совершил фатальную ошибку. И не ругайте за неизящные решения (всё еще только учусь). Заранее спасибо!
//Arduino Mega 2560
//БЛОК ИНДИКАТОРОВ МАХ7219_________________________________________________________________
#include <LedControl.h> //Подключение библиотеки max7219
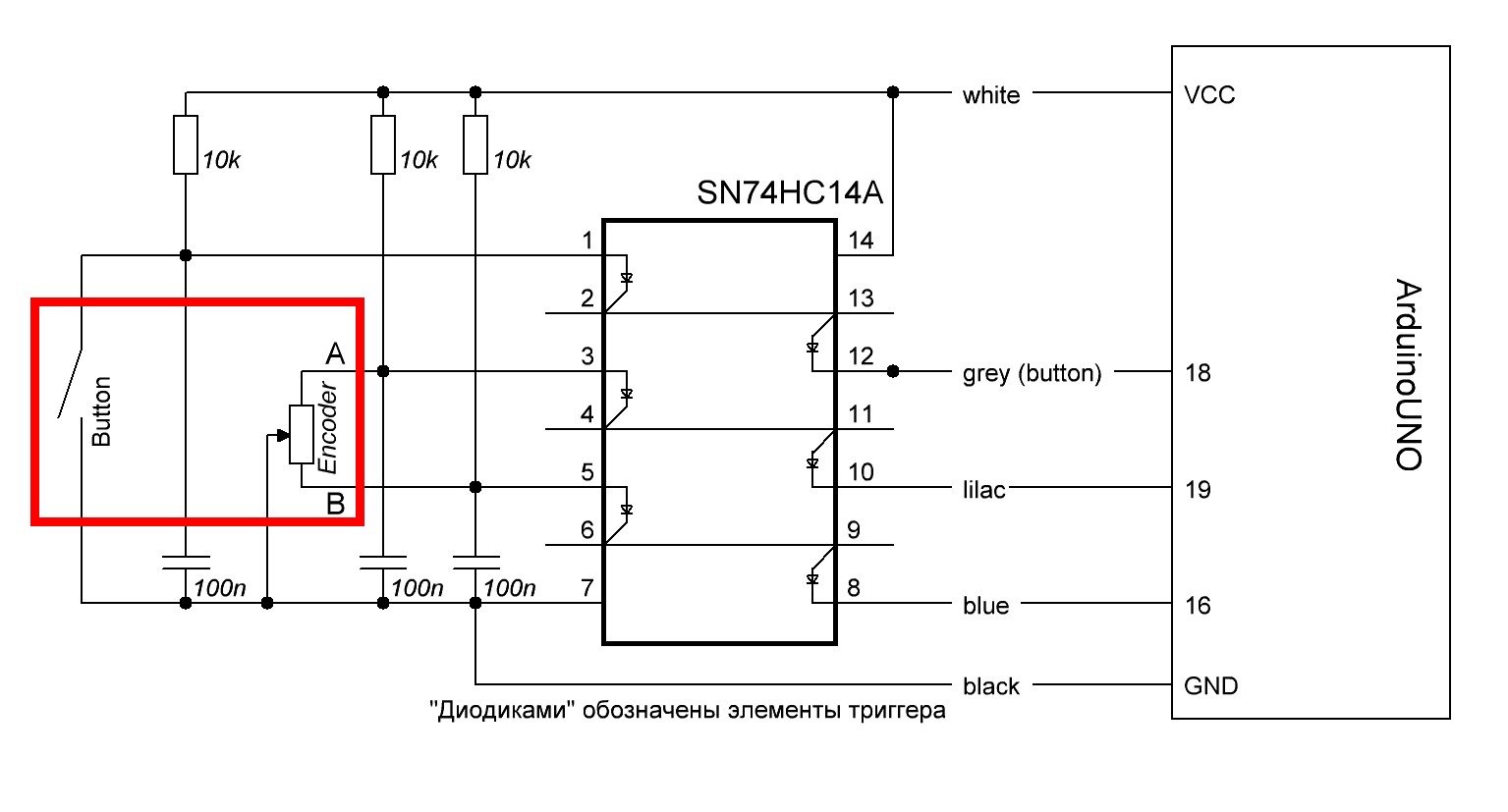
//Провода: VCC-белый, GND-серый, clk-зеленый, cs-синий, din-фиолетовый
//Пины модуля индикатора max7219
int pin_din=A0;
int pin_clk=A2;
int pin_cs=A1;
LedControl lc_max7219 = LedControl(pin_din, pin_clk, pin_cs, 3); //Создаём объект класса LedControl (din,clk,cs,X) X - количество модулей
//Переменные для индикации
int tys; // Тысячи
int sot; // Сотни
int des; // Десятки
int edi; // Единицы
// Массив с закодированными символами для надписей.
byte bukvy[16] =
{
B00110111, //H-0
B01110111, //A-1
B01000110, //Г-2
B01100111, //Р-3
B01001111, //Е-4
B01111111, //В-5
B01111001, //З-6
B01111110, //O-7
B01110110, //П-8
B00111110, //И-9
B01001110, //С-10
B00011111, //Ь-11
B00000000, //пробел-12
B01100011, //знак градуса-13
B01011111, //Б-14
B00111011, //У-15
};
/*
Надписи?
РАЗГОН
НАГРЕВ
ЗАПИСЬ
ГРА (дус колонны)_88,8о
СБР (ос)_88,8о
ПАУЗА_44
НАСОС_99
*/
//____________________________________________________________________________________________
//БЛОК ЭНКОДЕРА НАСТРОЙКИ____________________________________________________________________
//Переменные энкодера настройки
volatile int but_setup_val; // Значение кнопки настройки
volatile int enc_setup_val=20; // Значение энкодера настройки
volatile int enc_setup_flag=0; // Разрешение работы энкодера настройки
int ten_resist=11; // Сопротивление ТЭНа
int ten_power; // Настроенная мощность ТЭНа
//Пины модуля энкодера настройки
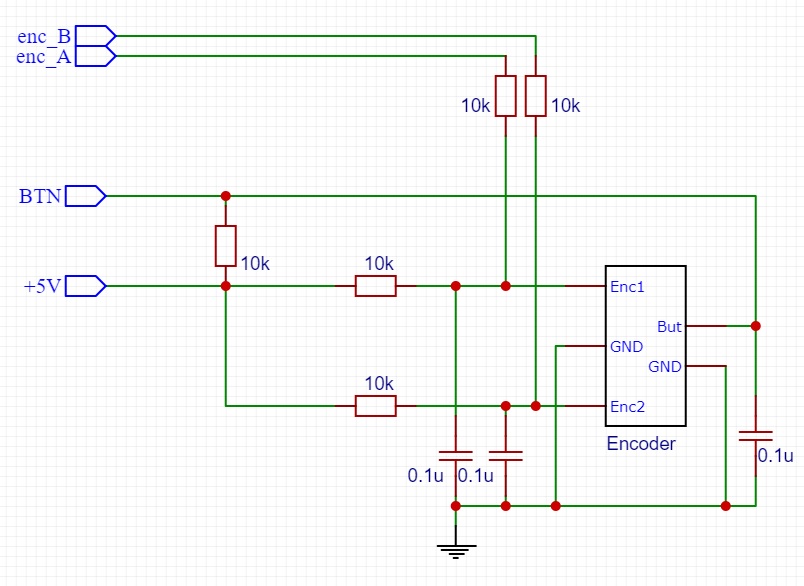
int pin_but_setup=18; //серый
int pin_enc_setupA=19; //фиолетовый
int pin_enc_setupB=16; //синий
//Пины управления реле PC817
//VCC=оранжевый
//GND=синий
int pin_relay_full=A14; //зеленый
int pin_relay_stop=A15; //желтый
//Пины управления HY-M154
//GND=коричневый
int pin_plus=A13; //оранжевый
int pin_minus=A12; //красный
//____________________________________________________________________________________________
//БЛОК ЭНКОДЕРА ТЕМПЕРАТУРЫ____________________________________________________________________
//Переменные энкодера температуры
volatile int but_temp_val; // Значение кнопки температуры
volatile int enc_temp_val=0; // Значение энкодера температуры
volatile int enc_temp_flag=0; // Разрешение работы энкодера температуры
//Пины модуля энкодера температуры
int pin_but_temp=20;
int pin_enc_tempA=21;
int pin_enc_tempB=17;
//____________________________________________________________________________________________
//БЛОК ЭНКОДЕРА КЛАПАНА____________________________________________________________________
//Переменные энкодера клапана
volatile int but_valve_val; // Значение кнопки клапана
volatile int enc_valve_val=0; // Значение энкодера клапана
volatile int enc_valve_flag=0; // Разрешение работы энкодера клапана
//Пины модуля энкодера клапана
int pin_but_valve=2;
int pin_enc_valveA=3;
int pin_enc_valveB=14;
//Пины управления клапаном и насосом
int pin_valve=6;
int pin_pump=7;
//____________________________________________________________________________________________
//БЛОК ДАТЧИКА ТЕМПЕРАТУРЫ____________________________________________________________________
//int pin_ds1820=2; //(!!!)
//____________________________________________________________________________________________
//БЛОК ВЕНТИЛАТОРА АВТОНОМКИ_________________________________________________________________
int pin_cooler=8;
//____________________________________________________________________________________________
void setup()
{
Serial.begin(115200);// Объявляем скорость порта
//Инициализация индикаторов
lc_max7219.shutdown(0, false); //Выводим из спящего режима
lc_max7219.setIntensity(0,7); //Яркость дисплея на 7. Всего возможных режимов яркости от 0 до 15
lc_max7219.clearDisplay(0); //Очистить дисплей
lc_max7219.shutdown(1, false); //Выводим из спящего режима
lc_max7219.setIntensity(1,7); //Яркость дисплея на 7. Всего возможных режимов яркости от 0 до 15
lc_max7219.clearDisplay(1); //Очистить дисплей
lc_max7219.shutdown(2, false); //Выводим из спящего режима
lc_max7219.setIntensity(2,7); //Яркость дисплея на 7. Всего возможных режимов яркости от 0 до 15
lc_max7219.clearDisplay(2); //Очистить дисплей
//Пин насоса на выход
pinMode(pin_pump, OUTPUT);
//Пины вентилятора на выход
pinMode(pin_cooler, OUTPUT);
//Пины модуля энкодера настройки на вход
pinMode(pin_but_setup, INPUT);
pinMode(pin_enc_setupA, INPUT);
pinMode(pin_enc_setupB, INPUT);
//Пины модуля энкодера температуры на вход
pinMode(pin_but_temp, INPUT);
pinMode(pin_enc_tempA, INPUT);
pinMode(pin_enc_tempB, INPUT);
//Пины модуля энкодера клапана на вход
pinMode(pin_but_valve, INPUT);
pinMode(pin_enc_valveA, INPUT);
pinMode(pin_enc_valveB, INPUT);
//Пины индикатора max7219 на выход
pinMode(pin_din, OUTPUT);
pinMode(pin_clk, OUTPUT);
pinMode(pin_cs, OUTPUT);
/*Пины управления реле на PC817 на выход !!!Светодиоды загораются при LOW (замкнуты левые клеммы)
!!!Светодиоды гаснут при HIGH (замкнуты правые клеммы) */
pinMode(pin_relay_full, OUTPUT);
pinMode(pin_relay_stop, OUTPUT);
digitalWrite (pin_relay_full,HIGH);
digitalWrite (pin_relay_stop,HIGH);
//Пины управления HY-M154 на выход
pinMode(pin_plus, OUTPUT);
pinMode(pin_minus, OUTPUT);
digitalWrite (pin_plus,LOW);
digitalWrite (pin_minus,LOW);
//Назначение прерываний
attachInterrupt(0, BUTTON_VALVE, FALLING); //пин (2)прерывания кнопки клапана
attachInterrupt(1, ENCODER_VALVE, FALLING); //пин (3) прерывания энкодера клапана
attachInterrupt(5, BUTTON_SETUP, FALLING); //пин (18)прерывания кнопки настройки
attachInterrupt(4, ENCODER_SETUP, FALLING); //пин (19) прерывания энкодера настройки
attachInterrupt(3, BUTTON_TEMP, FALLING); //пин (20)прерывания кнопки температуры
attachInterrupt(2, ENCODER_TEMP, FALLING); //пин (21) прерывания энкодера температуры
}
void loop()
{
Serial.println(but_setup_val);
if (but_setup_val==1 && enc_setup_flag==1) //При 1-м нажатии кнопки настройки проводим полуавтоматическую настройку РМ-2н
{
RM_SETUP();
//Высчитываем и прописываем мощность на индикаторе
ten_power=(enc_setup_val*enc_setup_val)/ten_resist; // Расчет мощности по напряжению
tys = enc_setup_val / 1000;
sot = enc_setup_val % 1000/100;
des = enc_setup_val % 100 / 10;
edi = enc_setup_val % 10;
//Гасим левые нули
if (tys==0) //До 999 вт
{
lc_max7219.setRow(0, 7, bukvy[12]);//Гасим 0
lc_max7219.setDigit(0, 6, sot, false);
lc_max7219.setDigit(0, 5, des, false);
lc_max7219.setDigit(0, 4, edi, false);
lc_max7219.setRow(0, 2, bukvy[12]);//Индикация " "
lc_max7219.setRow(0, 1, bukvy[5]);//Индикация "В"
lc_max7219.setRow(0, 0, bukvy[1]);//Индикация "А"
}
if (tys==0 && sot==0) //До 999 вт
{
lc_max7219.setRow(0, 7, bukvy[12]);//Гасим 0
lc_max7219.setRow(0, 6, bukvy[12]);//Гасим 0
lc_max7219.setDigit(0, 5, des, false);
lc_max7219.setDigit(0, 4, edi, false);
lc_max7219.setRow(0, 2, bukvy[12]);//Индикация " "
lc_max7219.setRow(0, 1, bukvy[5]);//Индикация "В"
lc_max7219.setRow(0, 0, bukvy[1]);//Индикация "А"
}
if (tys==0 && sot==0 && des==0) //До 9 вт
{
lc_max7219.setRow(0, 7, bukvy[12]);//Гасим 0
lc_max7219.setRow(0, 6, bukvy[12]);//Гасим 0
lc_max7219.setRow(0, 5, bukvy[12]);//Гасим 0
lc_max7219.setDigit(0, 4, edi, false);
lc_max7219.setRow(0, 2, bukvy[12]);//Индикация " "
lc_max7219.setRow(0, 1, bukvy[5]);//Индикация "В"
lc_max7219.setRow(0, 0, bukvy[1]);//Индикация "А"
}
if (tys>0) //До 9999 вт
{
lc_max7219.setDigit(0, 6, tys, false);
lc_max7219.setDigit(0, 5, sot, false);
lc_max7219.setDigit(0, 4, des, false);
lc_max7219.setDigit(0, 3, edi, false);
lc_max7219.setRow(0, 2, bukvy[12]);//Гасим 0
lc_max7219.setRow(0, 1, bukvy[5]);//Индикация "В"
lc_max7219.setRow(0, 0, bukvy[1]);//Индикация "А"
}
}
if (but_setup_val==2 ) //При 2-м нажатии кнопки настройки запускаем разгон (максимальная можность)
{
digitalWrite (pin_relay_full,LOW); //Реле замыкает клеммы + и Р на РМ-2н
//Пишем " РАЗГОН " на индикаторе
lc_max7219.setRow(0, 7, bukvy[12]);//Индикация "_"
lc_max7219.setRow(0, 6, bukvy[3]);//Индикация "Р"
lc_max7219.setRow(0, 5, bukvy[1]);//Индикация "А"
lc_max7219.setRow(0, 4, bukvy[6]);//Индикация "З"
lc_max7219.setRow(0, 3, bukvy[2]);//Индикация "Г"
lc_max7219.setRow(0, 2, bukvy[7]);//Индикация "О"
lc_max7219.setRow(0, 1, bukvy[0]);//Индикация "Н"
lc_max7219.setRow(0, 0, bukvy[12]);//Индикация "_"
}
if (but_setup_val==3 ) //При 3-м нажатии кнопки настройки переходим в рабочий режим нагрева
{
digitalWrite (pin_relay_full,HIGH); //Реле размыкает клеммы + и Р на РМ-2н (отключается разгон, переход на ранее настроенную мощность)
//Пишем " НАГРЕВ " на индикаторе
lc_max7219.setRow(0, 7, bukvy[12]);//Индикация "_"
lc_max7219.setRow(0, 6, bukvy[0]);//Индикация "Н"
lc_max7219.setRow(0, 5, bukvy[1]);//Индикация "А"
lc_max7219.setRow(0, 4, bukvy[2]);//Индикация "Г"
lc_max7219.setRow(0, 3, bukvy[3]);//Индикация "Р"
lc_max7219.setRow(0, 2, bukvy[4]);//Индикация "Е"
lc_max7219.setRow(0, 1, bukvy[5]);//Индикация "В"
lc_max7219.setRow(0, 0, bukvy[12]);//Индикация "_"
}
}
void BUTTON_SETUP() //Работа кнопки настройки
{
but_setup_val++;
if (but_setup_val=!1) {enc_setup_flag=0;} // Запрещаем работу энкодера настройки
if (but_setup_val>3) {but_setup_val=0;} // Обнуляем кнопку настройки
}
void BUTTON_TEMP() //Работа кнопки температуры
{
}
void BUTTON_VALVE() //Работа кнопки клапана
{
}
void ENCODER_SETUP() //Работа энкодера настройки
{
if (but_setup_val==1) //Если кнопка настройки в положении 1, настройка мощности нагрева
{
//Считываем энкодер настройки
int clk=digitalRead(pin_enc_setupA);
int dt=digitalRead(pin_enc_setupB);
if (clk<dt && enc_setup_val<261) //Повышаем рабочее напряжение
{
enc_setup_val++;
digitalWrite (pin_plus,HIGH);
delay (200);
digitalWrite (pin_plus,LOW);
}
if (clk>dt && enc_setup_val>19) //Понижаем рабочее напряжение
{
enc_setup_val--;
digitalWrite (pin_minus,HIGH);
delay (200);
digitalWrite (pin_minus,LOW);
}
}
}
void ENCODER_TEMP() //Работа энкодера температуры
{
}
void ENCODER_VALVE() //Работа энкодера клапана
{
}
void RM_SETUP()
{
digitalWrite (pin_plus,HIGH);
delay (200);
digitalWrite (pin_plus,LOW);
delay (200);
digitalWrite (pin_plus,HIGH);
delay (200);
digitalWrite (pin_plus,LOW);
delay (200);
digitalWrite (pin_plus,HIGH);
delay (200);
digitalWrite (pin_plus,LOW);
delay (200);
digitalWrite (pin_plus,HIGH);
delay (200);
digitalWrite (pin_plus,LOW);
delay (200);
digitalWrite (pin_minus,HIGH);
delay (200);
digitalWrite (pin_minus,LOW);
enc_setup_flag=1;
but_setup_val=1;
}