У камеры видеонаблюдения стал плохо работать привод вращения по горизонтали.
Вскрыл, отвалившееся пропаял, вопрос не в этом.
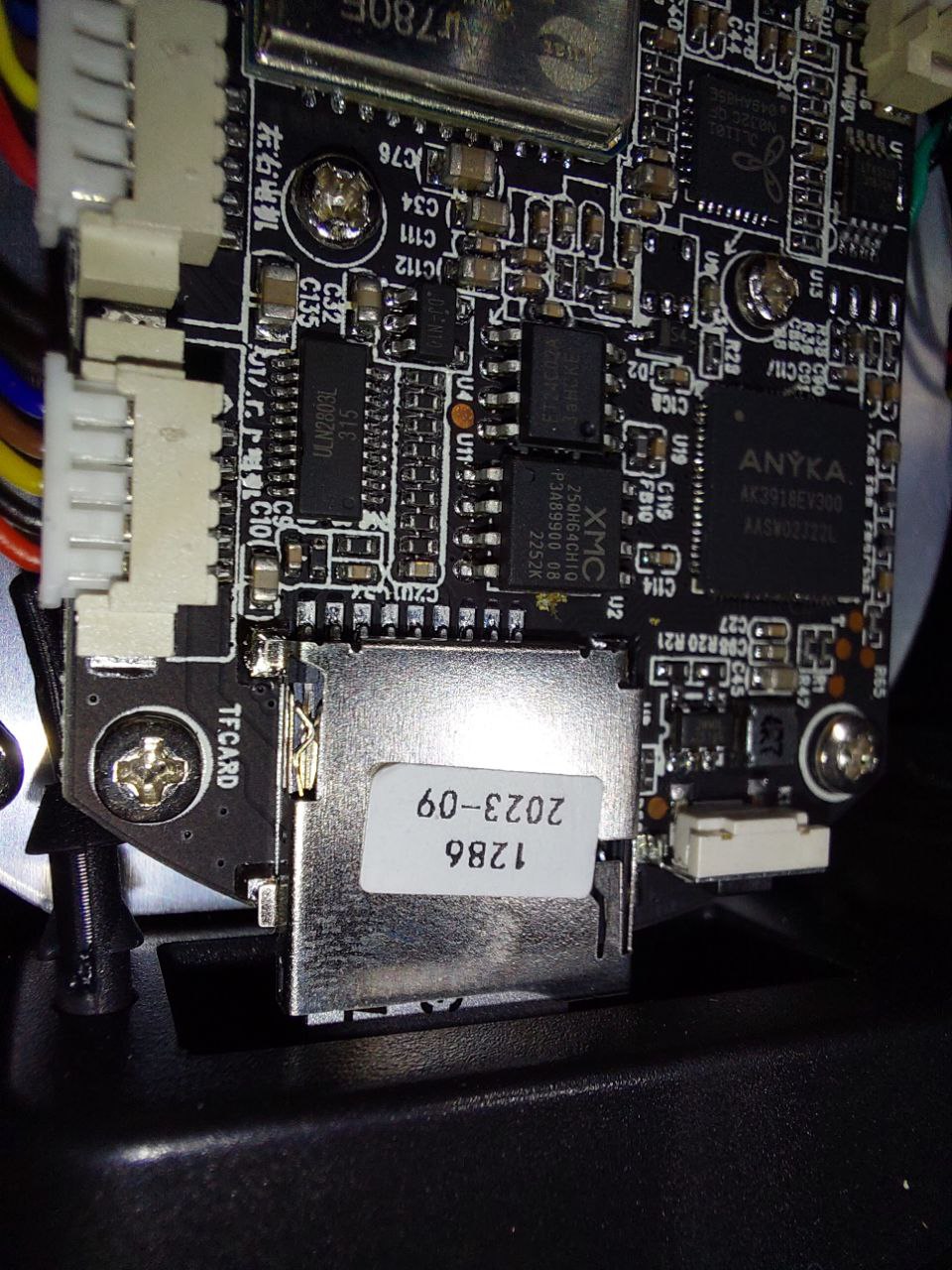
Горизонтальное вращение обеспечивается шаговым двигателем с редуктором:
К нему 5 проводников. На голове камеры шестеренка с ограничителем поворота. При включении камера поворачивается в одно крайнее положение, пару секунд упирается с треском, затем готова к работе. Повороты происходят до крайних положений “по памяти”, т.е. весь сектор поворота в шагах зашит в контроллер - фактически упора почти не происходит, ограничитель слегка касается крайних положений. Никаких концевиков.
На плате управления выделенного драйвера шаговиков (их два) не обнаружено, только сборка ULN2803L рядом с подключениями шаговых двигателей.
Тут какая технология? Контроль крайнего положения по току на двигатель? Просто вращение в упор с надеждой, что по таймауту камера окажется в крайнем положении, не выдерживает проверок - из любого положения вращение до упора, всегда пара секунд треска и готовность. Я думал обнаружить драйвер двигателей и в дальнейшем воспользоваться аналогичным - обнаруживать крайние положения. Видимо тут это реализовано самим контроллером? А это похоже “вещь в себе”.
Да я вижу, что по току. Я как раз и интересовался - такая технология рабочая? Чтобы без концевиков обойтись. Редуктор только жалко, когда-нибудь навернется от такого насилия.
А драйверов шаговых двигателей с контролем тока не существует? Так чтобы сразу микросхемка из коробки, контроллером опрашивать вывод (ток или сразу сигнал “упор”)?
Допобвязкой, понятно, можно это реализовать. В чипе хочется. Удобно.
В этих кранах стоит фотоэлемент реагирующий на чередующие по кругу черные и белые сектора (4 сектора по 90 градусов). Сам шарик крутится всегда в одну сторону моторчиком.
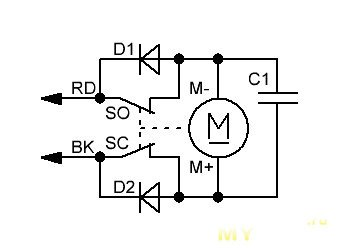
Двигатель маленький, 12В. На платке внутри корпуса привода — два диода и конденсатор. Два концевика, куда упирается в конце хода зубчатый сектор. Обычные микрики, которые можно добыть из любой комповой мышки. При работе концевики должны отслеживать край и разрывать цепь питания.
Если все исправно , не навернется … В таких схемах обычно за все отвечает контроллер … При подозрении , что двигатель менялся или нагрузка на него возросла когда контроллер этого не ожидал ,записывается флаг ошибки и при следующем включении контроллер производит калибровку . он гоняет движок до упора в одну сторону , ну или в две , смотря дя чего используется двигатель , и по возрастанию тока понимает , что двигатель уперся- значит ограничитель… В контроллере четко заложен алгоритм этого двигателя , например от одного крайнего положения до другого 700 шагов… соответственно после этого он уже определяет примерное положение по шагам и дальше упоров не заходит…
хотя есть где не заморачиваются .. ток возрос питание отключили или перекинули… но там как правило редукторы рассчитаны на кратковременную блокировку.
если двигатель шаговый то считают шаги если обычный , то по току при блокировке
обычно после ULN с одного конца обмотки двигла через резистор на ацп , возможно через буфер или усилитель.. похожая схема используется в ХХ многих авто
полно…в зависимости от задач. Например BLCD все с измерением тока , а многие даже с измерением напруги и фаз… да и простые тоже есть
например DRV8332
Драйвер BLDC и двухфазных двигателей с измерением тока через шунтирующие резисторы.
Позволяет контролировать ток в каждом канале и реализовывать защиту по току.
L6234 - Трехфазный драйвер с контролем тока по напряжению на внешних резисторах.
MC33926 (NXP) - Драйвер моторов постоянного тока с возможностью измерения тока через шунт.
TB67H420FTG - Драйвер шагового двигателя с встроенным контролем тока на основе ИМС.
Позволяет ограничивать ток и обеспечивает защиту от перегрузок.
A4988- Широко распространенный драйвер шагового двигателя с встроенным контролем тока.