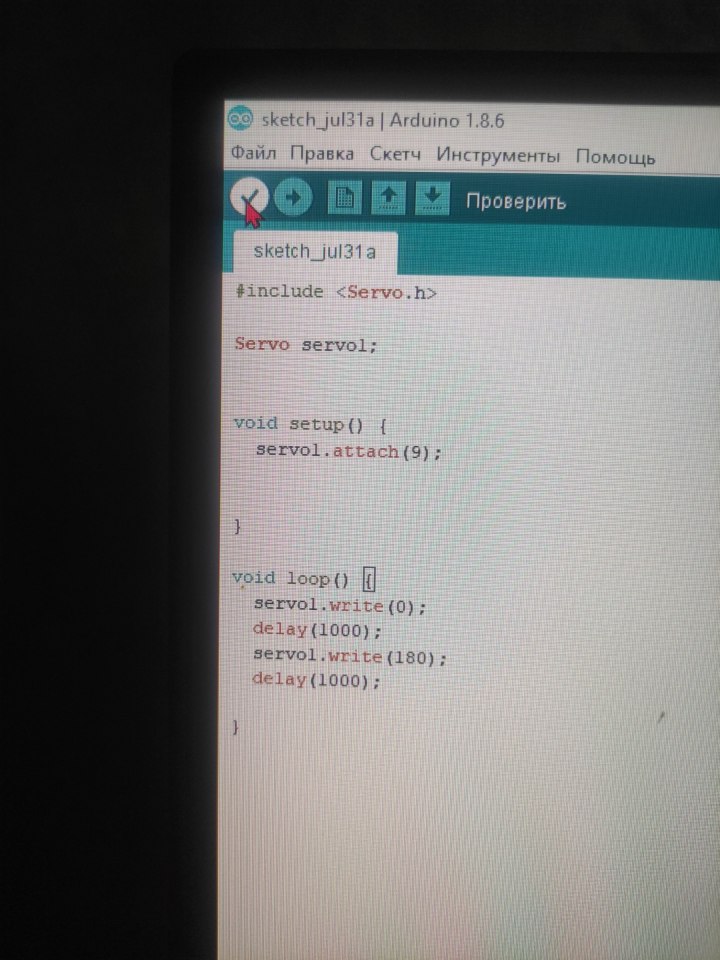
Здравствуйте, подскажите пожалуйста , подключаю серво моторчик к Ардуино нано, к порту 9 , вольт 5, и к земле . Всё правильно. Код брал с интернета рабочий. Плата Ардуино точно рабочие , он программируються, макетная плата и все проводки тоже рабочие.
Та неее, это рабочее, то рабочее, он рабатает, вы простто не заметили.
Точно?
А то бывает…

Ничего не понял
Я проверял тестером провода
Ну что не понятно, если все рабочее и правильно соединено должно работать!
1 лайк
Код показывайте, только правильно вставляйте сюда его.
ты на серву на какой провод сигнал подаёшь?
Это я зря написал???
Ладно, дальше, фотку как все соединено…
1 лайк
На 9 ШИМ
на серве, там три провода, по цветам, какой куда
Красный-5в , коричневый-GHB, оранжевый - Д9
Разницы мало имеет , вы хотели код переписать ?
Нет, я хотел, что бы вы прочитали правила и выложили код по этим правилам.
На словах все правильно и должно работать.
Понял , код я этот только переписывал с интернета
Но что то не так , хотя всё правильно соединено
Залей скетч из примеров
/* Sweep
by BARRAGAN <http://barraganstudio.com>
This example code is in the public domain.
modified 8 Nov 2013
by Scott Fitzgerald
https://www.arduino.cc/en/Tutorial/LibraryExamples/Sweep
*/
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 0; // variable to store the servo position
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15 ms for the servo to reach the position
}
for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15 ms for the servo to reach the position
}
}
Так давай показывай, фоткай…