Просто скажи номер пина на котором светодиод висит
это при помощи вот этого значка </>?
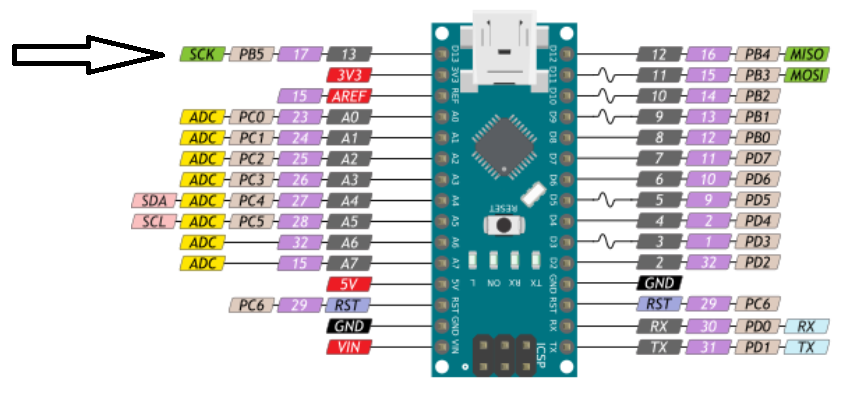
17 пин
17? Должен быть 13!!!
У меня нет слов… ![]() )))
)))
17 - это вывод МП
Вот жешь пример стандартный, используй его!
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
digitalWrite(LED_BUILTIN, HIGH); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(LED_BUILTIN, LOW); // turn the LED off by making the voltage LOW
delay(1000); // wait for a second
}
так его же и брал в примерах
Я думаю он стандартный пример и использовал… По этому естественно нифига не блинкает!
Давай новую терминологию изобретать…
пин 13 соотв 17 выводу процессора
При ответе нажмите ШЕСТЕРЕНКУ и там вберите - скрыть под спойлер
Блин, как все сложно то… ![]()
извиняюсь, у меня на плате пинов как на ардуине нет, поэтому оперирую к выводам процессора
Да, но в Ардуино IDE указывают номер цифрового вывода, а не номер МК. Этой терминологии и нужно придерживаться!
оке, еще раз не помешает)))
Это был не стёб, а пожелание. Чтобы разговаривать “на одном языке”.
И Командир уже заждался HEX-файла…
Если с:
LOW - 0xFF
HIGH - 0xD7
EXTENDED - 0xFD
заморгает, то загрузчик в hex файле не тот !!!
hex с optiboot
:020000040000FA
:100000000C9461000C9473000C9473000C947300B6
:100010000C9473000C9473000C9473000C94730094
:100020000C9473000C9473000C9473000C94730084
:100030000C9473000C9473000C9473000C94730074
:100040000C9418010C9473000C9473000C947300BE
:100050000C9473000C9473000C9473000C94730054
:100060000C9473000C94730000000000240027001F
:100070002A0000000000250028002B0004040404CE
:100080000404040402020202020203030303030342
:10009000020203010204081020408001020408103B
:1000A00020010204081020408040000000090003E5
:1000B000020000040508000000000000000000002D
:1000C000000011241FBECFEFD8E0DEBFCDBF21E07E
:1000D000A0E0B1E001C01D92A930B207E1F70E9493
:1000E00062010C94B6010C940000E7EBF0E024915F
:1000F000E0EAF0E09491E9E8F0E0E491EE23C9F061
:10010000222339F0243001F1A8F4223069F12330A0
:1001100079F1F0E0EE0FFF1FEE58FF4FA591B4917B
:100120002FB7F894EC91811126C090959E239C9353
:100130002FBF0895283071F0293091F0253049F70C
:10014000209180002F7D03C0209180002F77209385
:100150008000DFCF2091B0002F772093B000D9CF5F
:100160002091B0002F7DF9CF24B52F7724BDD1CFBA
:1001700024B52F7DFBCF9E2BDACF3FB7F89480912B
:10018000050190910601A0910701B091080126B5E3
:10019000A89B05C02F3F19F00196A11DB11D3FBFBF
:1001A000BA2FA92F982F8827BC01CD01620F711D8E
:1001B000811D911D42E0660F771F881F991F4A9588
:1001C000D1F708958F929F92AF92BF92CF92DF9214
:1001D000EF92FF920E94BD004B015C0188EEC82E99
:1001E00083E0D82EE12CF12C0E94BD00681979091A
:1001F0008A099B09683E734081059105A8F321E0B7
:10020000C21AD108E108F10888EE880E83E0981E32
:10021000A11CB11CC114D104E104F10429F7FF9021
:10022000EF90DF90CF90BF90AF909F908F90089508
:100230001F920F920FB60F9211242F933F938F931B
:100240009F93AF93BF938091010190910201A09180
:100250000301B09104013091000123E0230F2D37F9
:1002600068F126E8230F0296A11DB11D209300011D
:100270008093010190930201A0930301B0930401C4
:100280008091050190910601A0910701B0910801AC
:100290000196A11DB11D8093050190930601A093C5
:1002A0000701B0930801BF91AF919F918F913F914A
:1002B0002F910F900FBE0F901F9018950196A11DC2
:1002C000B11DD4CF789484B5836084BD85B5836037
:1002D00085BD80916E00816080936E0082E0809386
:1002E00081008091810081608093810080918000F5
:1002F0008160809380008091B10084608093B10020
:100300008091B00081608093B00087E880937A008C
:100310001092C100E0EAF0E02491E9E8F0E0849175
:10032000882399F090E0880F991FFC01E859FF4F4E
:10033000A591B491FC01EE58FF4F859194918FB730
:10034000F894EC91E22BEC938FBFC0E0D0E081E019
:100350000E9475000E94E20080E00E9475000E94E9
:10036000E2002097A1F30E940000F1CFF894FFCFA4
:107E000001C0B7C0112484B790E89093610010922C
:107E10006100882361F0982F9A70923041F081FFC1
:107E200002C097EF94BF282E80E0C6D0E9C085E05D
:107E30008093810082E08093C00088E18093C1003C
:107E400080E18093C40086E08093C2008EE0B4D0CD
:107E5000259A84E020E33CEF91E030938500209365
:107E6000840096BBB09BFECF1D9AA8954091C000A0
:107E700047FD02C0815089F793D0813479F490D0C6
:107E8000182FA0D0123811F480E004C088E0113817
:107E900009F083E07ED080E17CD0EECF823419F40B
:107EA00084E198D0F8CF853411F485E0FACF853598
:107EB00041F476D0C82F74D0D82FCC0FDD1F82D0DC
:107EC000EACF863519F484E085D0DECF843691F58B
:107ED00067D066D0F82E64D0D82E00E011E05801AB
:107EE0008FEFA81AB80A5CD0F80180838501FA10D8
:107EF000F6CF68D0F5E4DF1201C0FFCF50E040E0DC
:107F000063E0CE0136D08E01E0E0F1E06F0182E067
:107F1000C80ED11C4081518161E0C8012AD00E5F9A
:107F20001F4FF601FC10F2CF50E040E065E0CE01BB
:107F300020D0B1CF843771F433D032D0F82E30D086
:107F400041D08E01F80185918F0123D0FA94F11070
:107F5000F9CFA1CF853739F435D08EE11AD085E934
:107F600018D08FE097CF813509F0A9CF88E024D0D1
:107F7000A6CFFC010A0167BFE895112407B600FCF3
:107F8000FDCF667029F0452B19F481E187BFE89594
:107F900008959091C00095FFFCCF8093C60008958E
:107FA0008091C00087FFFCCF8091C00084FD01C09C
:107FB000A8958091C6000895E0E6F0E098E19083EE
:107FC00080830895EDDF803219F088E0F5DFFFCF80
:107FD00084E1DFCFCF93C82FE3DFC150E9F7CF9122
:027FE000F1CFDF
:027FFE00000879
:00000001FF
С этим hex файлом нужно использовать фьюзы:
LOW - 0xFF
HIGH - 0xD6
EXTENDED - 0xFD
1 лайк
Добавил в скетч ArduinoISP генерацию 4 МГц на выводе 3 Arduino (ножка 1 МК):
ArduinoISP + 4 MHz
// ArduinoISP
// Copyright (c) 2008-2011 Randall Bohn
// If you require a license, see
// https://opensource.org/licenses/bsd-license.php
//
// This sketch turns the Arduino into a AVRISP using the following Arduino pins:
//
// Pin 10 is used to reset the target microcontroller.
//
// By default, the hardware SPI pins MISO, MOSI and SCK are used to communicate
// with the target. On all Arduinos, these pins can be found
// on the ICSP/SPI header:
//
// MISO °. . 5V (!) Avoid this pin on Due, Zero...
// SCK . . MOSI
// . . GND
//
// On some Arduinos (Uno,...), pins MOSI, MISO and SCK are the same pins as
// digital pin 11, 12 and 13, respectively. That is why many tutorials instruct
// you to hook up the target to these pins. If you find this wiring more
// practical, have a define USE_OLD_STYLE_WIRING. This will work even when not
// using an Uno. (On an Uno this is not needed).
//
// Alternatively you can use any other digital pin by configuring
// software ('BitBanged') SPI and having appropriate defines for PIN_MOSI,
// PIN_MISO and PIN_SCK.
//
// IMPORTANT: When using an Arduino that is not 5V tolerant (Due, Zero, ...) as
// the programmer, make sure to not expose any of the programmer's pins to 5V.
// A simple way to accomplish this is to power the complete system (programmer
// and target) at 3V3.
//
// Put an LED (with resistor) on the following pins:
// 9: Heartbeat - shows the programmer is running
// 8: Error - Lights up if something goes wrong (use red if that makes sense)
// 7: Programming - In communication with the slave
//
#include "Arduino.h"
#undef SERIAL
#define PROG_FLICKER true
// Configure SPI clock (in Hz).
// E.g. for an ATtiny @ 128 kHz: the datasheet states that both the high and low
// SPI clock pulse must be > 2 CPU cycles, so take 3 cycles i.e. divide target
// f_cpu by 6:
// #define SPI_CLOCK (128000/6)
//
// A clock slow enough for an ATtiny85 @ 1 MHz, is a reasonable default:
#define SPI_CLOCK (1000000/6)
// Select hardware or software SPI, depending on SPI clock.
// Currently only for AVR, for other architectures (Due, Zero,...), hardware SPI
// is probably too fast anyway.
#if defined(ARDUINO_ARCH_AVR)
#if SPI_CLOCK > (F_CPU / 128)
#define USE_HARDWARE_SPI
#endif
#endif
// Configure which pins to use:
// The standard pin configuration.
#ifndef ARDUINO_HOODLOADER2
#define RESET 10 // Use pin 10 to reset the target rather than SS
#define LED_HB 9
#define LED_ERR 8
#define LED_PMODE 7
// Uncomment following line to use the old Uno style wiring
// (using pin 11, 12 and 13 instead of the SPI header) on Leonardo, Due...
// #define USE_OLD_STYLE_WIRING
#ifdef USE_OLD_STYLE_WIRING
#define PIN_MOSI 11
#define PIN_MISO 12
#define PIN_SCK 13
#endif
// HOODLOADER2 means running sketches on the ATmega16U2 serial converter chips
// on Uno or Mega boards. We must use pins that are broken out:
#else
#define RESET 4
#define LED_HB 7
#define LED_ERR 6
#define LED_PMODE 5
#endif
// By default, use hardware SPI pins:
#ifndef PIN_MOSI
#define PIN_MOSI MOSI
#endif
#ifndef PIN_MISO
#define PIN_MISO MISO
#endif
#ifndef PIN_SCK
#define PIN_SCK SCK
#endif
// Force bitbanged SPI if not using the hardware SPI pins:
#if (PIN_MISO != MISO) || (PIN_MOSI != MOSI) || (PIN_SCK != SCK)
#undef USE_HARDWARE_SPI
#endif
// Configure the serial port to use.
//
// Prefer the USB virtual serial port (aka. native USB port), if the Arduino has one:
// - it does not autoreset (except for the magic baud rate of 1200).
// - it is more reliable because of USB handshaking.
//
// Leonardo and similar have an USB virtual serial port: 'Serial'.
// Due and Zero have an USB virtual serial port: 'SerialUSB'.
//
// On the Due and Zero, 'Serial' can be used too, provided you disable autoreset.
// To use 'Serial': #define SERIAL Serial
#ifdef SERIAL_PORT_USBVIRTUAL
#define SERIAL SERIAL_PORT_USBVIRTUAL
#else
#define SERIAL Serial
#endif
// Configure the baud rate:
#define BAUDRATE 19200
// #define BAUDRATE 115200
// #define BAUDRATE 1000000
#define HWVER 2
#define SWMAJ 1
#define SWMIN 18
// STK Definitions
#define STK_OK 0x10
#define STK_FAILED 0x11
#define STK_UNKNOWN 0x12
#define STK_INSYNC 0x14
#define STK_NOSYNC 0x15
#define CRC_EOP 0x20 //ok it is a space...
void pulse(int pin, int times);
#ifdef USE_HARDWARE_SPI
#include "SPI.h"
#else
#define SPI_MODE0 0x00
#if !defined(ARDUINO_API_VERSION) || ARDUINO_API_VERSION != 10001 // A SPISettings class is declared by ArduinoCore-API 1.0.1
class SPISettings {
public:
// clock is in Hz
SPISettings(uint32_t clock, uint8_t bitOrder, uint8_t dataMode) : clockFreq(clock) {
(void) bitOrder;
(void) dataMode;
};
uint32_t getClockFreq() const {
return clockFreq;
}
private:
uint32_t clockFreq;
};
#endif // !defined(ARDUINO_API_VERSION)
class BitBangedSPI {
public:
void begin() {
digitalWrite(PIN_SCK, LOW);
digitalWrite(PIN_MOSI, LOW);
pinMode(PIN_SCK, OUTPUT);
pinMode(PIN_MOSI, OUTPUT);
pinMode(PIN_MISO, INPUT);
}
void beginTransaction(SPISettings settings) {
pulseWidth = (500000 + settings.getClockFreq() - 1) / settings.getClockFreq();
if (pulseWidth == 0) {
pulseWidth = 1;
}
}
void end() {}
uint8_t transfer(uint8_t b) {
for (unsigned int i = 0; i < 8; ++i) {
digitalWrite(PIN_MOSI, (b & 0x80) ? HIGH : LOW);
digitalWrite(PIN_SCK, HIGH);
delayMicroseconds(pulseWidth);
b = (b << 1) | digitalRead(PIN_MISO);
digitalWrite(PIN_SCK, LOW); // slow pulse
delayMicroseconds(pulseWidth);
}
return b;
}
private:
unsigned long pulseWidth; // in microseconds
};
static BitBangedSPI SPI;
#endif
void setup() {
// 4 MHZ clock on pin 3
pinMode(3, OUTPUT);
OCR2A = 1;
TCNT2 = 0;
TCCR2A = (1 << COM2B0) | (1 << WGM21);
TCCR2B = (1 << CS20);
SERIAL.begin(BAUDRATE);
pinMode(LED_PMODE, OUTPUT);
pulse(LED_PMODE, 2);
pinMode(LED_ERR, OUTPUT);
pulse(LED_ERR, 2);
pinMode(LED_HB, OUTPUT);
pulse(LED_HB, 2);
}
int ISPError = 0;
int pmode = 0;
// address for reading and writing, set by 'U' command
unsigned int here;
uint8_t buff[256]; // global block storage
#define beget16(addr) (*addr * 256 + *(addr+1) )
typedef struct param {
uint8_t devicecode;
uint8_t revision;
uint8_t progtype;
uint8_t parmode;
uint8_t polling;
uint8_t selftimed;
uint8_t lockbytes;
uint8_t fusebytes;
uint8_t flashpoll;
uint16_t eeprompoll;
uint16_t pagesize;
uint16_t eepromsize;
uint32_t flashsize;
}
parameter;
parameter param;
// this provides a heartbeat on pin 9, so you can tell the software is running.
uint8_t hbval = 128;
int8_t hbdelta = 8;
void heartbeat() {
static unsigned long last_time = 0;
unsigned long now = millis();
if ((now - last_time) < 40) {
return;
}
last_time = now;
if (hbval > 192) {
hbdelta = -hbdelta;
}
if (hbval < 32) {
hbdelta = -hbdelta;
}
hbval += hbdelta;
analogWrite(LED_HB, hbval);
}
static bool rst_active_high;
void reset_target(bool reset) {
digitalWrite(RESET, ((reset && rst_active_high) || (!reset && !rst_active_high)) ? HIGH : LOW);
}
void loop(void) {
// is pmode active?
if (pmode) {
digitalWrite(LED_PMODE, HIGH);
} else {
digitalWrite(LED_PMODE, LOW);
}
// is there an error?
if (ISPError) {
digitalWrite(LED_ERR, HIGH);
} else {
digitalWrite(LED_ERR, LOW);
}
// light the heartbeat LED
heartbeat();
if (SERIAL.available()) {
avrisp();
}
}
uint8_t getch() {
while (!SERIAL.available());
return SERIAL.read();
}
void fill(int n) {
for (int x = 0; x < n; x++) {
buff[x] = getch();
}
}
#define PTIME 30
void pulse(int pin, int times) {
do {
digitalWrite(pin, HIGH);
delay(PTIME);
digitalWrite(pin, LOW);
delay(PTIME);
} while (times--);
}
void prog_lamp(int state) {
if (PROG_FLICKER) {
digitalWrite(LED_PMODE, state);
}
}
uint8_t spi_transaction(uint8_t a, uint8_t b, uint8_t c, uint8_t d) {
SPI.transfer(a);
SPI.transfer(b);
SPI.transfer(c);
return SPI.transfer(d);
}
void empty_reply() {
if (CRC_EOP == getch()) {
SERIAL.print((char)STK_INSYNC);
SERIAL.print((char)STK_OK);
} else {
ISPError++;
SERIAL.print((char)STK_NOSYNC);
}
}
void breply(uint8_t b) {
if (CRC_EOP == getch()) {
SERIAL.print((char)STK_INSYNC);
SERIAL.print((char)b);
SERIAL.print((char)STK_OK);
} else {
ISPError++;
SERIAL.print((char)STK_NOSYNC);
}
}
void get_version(uint8_t c) {
switch (c) {
case 0x80:
breply(HWVER);
break;
case 0x81:
breply(SWMAJ);
break;
case 0x82:
breply(SWMIN);
break;
case 0x93:
breply('S'); // serial programmer
break;
default:
breply(0);
}
}
void set_parameters() {
// call this after reading parameter packet into buff[]
param.devicecode = buff[0];
param.revision = buff[1];
param.progtype = buff[2];
param.parmode = buff[3];
param.polling = buff[4];
param.selftimed = buff[5];
param.lockbytes = buff[6];
param.fusebytes = buff[7];
param.flashpoll = buff[8];
// ignore buff[9] (= buff[8])
// following are 16 bits (big endian)
param.eeprompoll = beget16(&buff[10]);
param.pagesize = beget16(&buff[12]);
param.eepromsize = beget16(&buff[14]);
// 32 bits flashsize (big endian)
param.flashsize = buff[16] * 0x01000000
+ buff[17] * 0x00010000
+ buff[18] * 0x00000100
+ buff[19];
// AVR devices have active low reset, AT89Sx are active high
rst_active_high = (param.devicecode >= 0xe0);
}
void start_pmode() {
// Reset target before driving PIN_SCK or PIN_MOSI
// SPI.begin() will configure SS as output, so SPI master mode is selected.
// We have defined RESET as pin 10, which for many Arduinos is not the SS pin.
// So we have to configure RESET as output here,
// (reset_target() first sets the correct level)
reset_target(true);
pinMode(RESET, OUTPUT);
SPI.begin();
SPI.beginTransaction(SPISettings(SPI_CLOCK, MSBFIRST, SPI_MODE0));
// See AVR datasheets, chapter "SERIAL_PRG Programming Algorithm":
// Pulse RESET after PIN_SCK is low:
digitalWrite(PIN_SCK, LOW);
delay(20); // discharge PIN_SCK, value arbitrarily chosen
reset_target(false);
// Pulse must be minimum 2 target CPU clock cycles so 100 usec is ok for CPU
// speeds above 20 KHz
delayMicroseconds(100);
reset_target(true);
// Send the enable programming command:
delay(50); // datasheet: must be > 20 msec
spi_transaction(0xAC, 0x53, 0x00, 0x00);
pmode = 1;
}
void end_pmode() {
SPI.end();
// We're about to take the target out of reset so configure SPI pins as input
pinMode(PIN_MOSI, INPUT);
pinMode(PIN_SCK, INPUT);
reset_target(false);
pinMode(RESET, INPUT);
pmode = 0;
}
void universal() {
uint8_t ch;
fill(4);
ch = spi_transaction(buff[0], buff[1], buff[2], buff[3]);
breply(ch);
}
void flash(uint8_t hilo, unsigned int addr, uint8_t data) {
spi_transaction(0x40 + 8 * hilo,
addr >> 8 & 0xFF,
addr & 0xFF,
data);
}
void commit(unsigned int addr) {
if (PROG_FLICKER) {
prog_lamp(LOW);
}
spi_transaction(0x4C, (addr >> 8) & 0xFF, addr & 0xFF, 0);
if (PROG_FLICKER) {
delay(PTIME);
prog_lamp(HIGH);
}
}
unsigned int current_page() {
if (param.pagesize == 32) {
return here & 0xFFFFFFF0;
}
if (param.pagesize == 64) {
return here & 0xFFFFFFE0;
}
if (param.pagesize == 128) {
return here & 0xFFFFFFC0;
}
if (param.pagesize == 256) {
return here & 0xFFFFFF80;
}
return here;
}
void write_flash(int length) {
fill(length);
if (CRC_EOP == getch()) {
SERIAL.print((char) STK_INSYNC);
SERIAL.print((char) write_flash_pages(length));
} else {
ISPError++;
SERIAL.print((char) STK_NOSYNC);
}
}
uint8_t write_flash_pages(int length) {
int x = 0;
unsigned int page = current_page();
while (x < length) {
if (page != current_page()) {
commit(page);
page = current_page();
}
flash(LOW, here, buff[x++]);
flash(HIGH, here, buff[x++]);
here++;
}
commit(page);
return STK_OK;
}
#define EECHUNK (32)
uint8_t write_eeprom(unsigned int length) {
// here is a word address, get the byte address
unsigned int start = here * 2;
unsigned int remaining = length;
if (length > param.eepromsize) {
ISPError++;
return STK_FAILED;
}
while (remaining > EECHUNK) {
write_eeprom_chunk(start, EECHUNK);
start += EECHUNK;
remaining -= EECHUNK;
}
write_eeprom_chunk(start, remaining);
return STK_OK;
}
// write (length) bytes, (start) is a byte address
uint8_t write_eeprom_chunk(unsigned int start, unsigned int length) {
// this writes byte-by-byte, page writing may be faster (4 bytes at a time)
fill(length);
prog_lamp(LOW);
for (unsigned int x = 0; x < length; x++) {
unsigned int addr = start + x;
spi_transaction(0xC0, (addr >> 8) & 0xFF, addr & 0xFF, buff[x]);
delay(45);
}
prog_lamp(HIGH);
return STK_OK;
}
void program_page() {
char result = (char) STK_FAILED;
unsigned int length = 256 * getch();
length += getch();
char memtype = getch();
// flash memory @here, (length) bytes
if (memtype == 'F') {
write_flash(length);
return;
}
if (memtype == 'E') {
result = (char)write_eeprom(length);
if (CRC_EOP == getch()) {
SERIAL.print((char) STK_INSYNC);
SERIAL.print(result);
} else {
ISPError++;
SERIAL.print((char) STK_NOSYNC);
}
return;
}
SERIAL.print((char)STK_FAILED);
return;
}
uint8_t flash_read(uint8_t hilo, unsigned int addr) {
return spi_transaction(0x20 + hilo * 8,
(addr >> 8) & 0xFF,
addr & 0xFF,
0);
}
char flash_read_page(int length) {
for (int x = 0; x < length; x += 2) {
uint8_t low = flash_read(LOW, here);
SERIAL.print((char) low);
uint8_t high = flash_read(HIGH, here);
SERIAL.print((char) high);
here++;
}
return STK_OK;
}
char eeprom_read_page(int length) {
// here again we have a word address
int start = here * 2;
for (int x = 0; x < length; x++) {
int addr = start + x;
uint8_t ee = spi_transaction(0xA0, (addr >> 8) & 0xFF, addr & 0xFF, 0xFF);
SERIAL.print((char) ee);
}
return STK_OK;
}
void read_page() {
char result = (char)STK_FAILED;
int length = 256 * getch();
length += getch();
char memtype = getch();
if (CRC_EOP != getch()) {
ISPError++;
SERIAL.print((char) STK_NOSYNC);
return;
}
SERIAL.print((char) STK_INSYNC);
if (memtype == 'F') {
result = flash_read_page(length);
}
if (memtype == 'E') {
result = eeprom_read_page(length);
}
SERIAL.print(result);
}
void read_signature() {
if (CRC_EOP != getch()) {
ISPError++;
SERIAL.print((char) STK_NOSYNC);
return;
}
SERIAL.print((char) STK_INSYNC);
uint8_t high = spi_transaction(0x30, 0x00, 0x00, 0x00);
SERIAL.print((char) high);
uint8_t middle = spi_transaction(0x30, 0x00, 0x01, 0x00);
SERIAL.print((char) middle);
uint8_t low = spi_transaction(0x30, 0x00, 0x02, 0x00);
SERIAL.print((char) low);
SERIAL.print((char) STK_OK);
}
//////////////////////////////////////////
//////////////////////////////////////////
////////////////////////////////////
////////////////////////////////////
void avrisp() {
uint8_t ch = getch();
switch (ch) {
case '0': // signon
ISPError = 0;
empty_reply();
break;
case '1':
if (getch() == CRC_EOP) {
SERIAL.print((char) STK_INSYNC);
SERIAL.print("AVR ISP");
SERIAL.print((char) STK_OK);
} else {
ISPError++;
SERIAL.print((char) STK_NOSYNC);
}
break;
case 'A':
get_version(getch());
break;
case 'B':
fill(20);
set_parameters();
empty_reply();
break;
case 'E': // extended parameters - ignore for now
fill(5);
empty_reply();
break;
case 'P':
if (!pmode) {
start_pmode();
}
empty_reply();
break;
case 'U': // set address (word)
here = getch();
here += 256 * getch();
empty_reply();
break;
case 0x60: //STK_PROG_FLASH
getch(); // low addr
getch(); // high addr
empty_reply();
break;
case 0x61: //STK_PROG_DATA
getch(); // data
empty_reply();
break;
case 0x64: //STK_PROG_PAGE
program_page();
break;
case 0x74: //STK_READ_PAGE 't'
read_page();
break;
case 'V': //0x56
universal();
break;
case 'Q': //0x51
ISPError = 0;
end_pmode();
empty_reply();
break;
case 0x75: //STK_READ_SIGN 'u'
read_signature();
break;
// expecting a command, not CRC_EOP
// this is how we can get back in sync
case CRC_EOP:
ISPError++;
SERIAL.print((char) STK_NOSYNC);
break;
// anything else we will return STK_UNKNOWN
default:
ISPError++;
if (CRC_EOP == getch()) {
SERIAL.print((char)STK_UNKNOWN);
} else {
SERIAL.print((char)STK_NOSYNC);
}
}
}
Залейте этот скетч в рабочую UNO/NANO и пробуйте оживить 328PB.
MOSI MISO SCK брать с соответствующих ног,
RESET с 10 ноги Arduino
c 3 ноги Arduino меандр 4 МГц подать на вход XTAL1 (7 нога МК)
Прошивать из IDE выбрав в качестве программатора Arduino as ISP …